
Entre em Contato com Zhouxiang
Ao medir um robô de soldagem ou comparar opções, os fabricantes tendem a começar considerando o alcance, a carga útil e o ciclo de trabalho Essas especificações são importantes Mas o segredo para levar seu projeto de automação do projeto ao chão de fábrica ou descobrir onde ele fica atolado por meses a fio É o método de programação.
A prática de programação dita quanto tempo levará para que uma nova peça funcione, quais capacidades a força de trabalho precisa para programá-la e quanto tempo morto a célula de soldagem do robô terá que absorver cada vez que as operações mudarem Um robô que lida com tarefas de soldagem perfeitamente, mas requer seis horas de reprogramação, será um ativo perigoso em uma loja flexível E um sistema que leva dois minutos para se programar só é valioso se a equipe puder confiar na saída.
Este relatório divide os três dominantes robô soldagem métodos de programação, para que você possa determinar o método apropriado para sua oficina de soldagem Pense nisso como um modelo para avaliar sua programação de soldagem robótica ou projetar sua configuração de automação.
Por que o método de programação é o maior fator na adoção do sistema
De acordo com a Federação Internacional de Robótica, instalações mundiais de robôs atingiram 541.302 unidades em 2023, com soldagem a arco e soldagem robótica permanecendo algumas das aplicações mais comuns As taxas de adoção são inconsistentes entre lojas e, surpreendentemente, muitas vezes o obstáculo não é dinheiro É sobre o atrito de integração Enquanto tanto os fornecedores quanto os integradores de robôs começaram a fornecer ferramentas para ajudar a automatizar a programação, a abordagem de programação precisa se alinhar com a loja.
A maioria das iniciativas de soldagem robótica malsucedidas que encontramos pode ser atribuída à incompatibilidade com a programação de soldagem robótica, em vez da tecnologia Uma loja que lida com 200 números de peças distintos por mês não pode se dar ao luxo de dedicar quatro horas para ensinar cada novo caminho de solda Uma linha que produz o mesmo suporte 50.000 vezes não precisa de um arranjo sem ensino habilitado para visão (teachless). Uma configuração fixa de pingente de ensino funciona bem.
Sua decisão depende de três considerações: a variedade de peças (frequência de novos trabalhos), as habilidades das pessoas e o nível de ociosidade com que sua empresa pode correr durante as configurações Pregue essa escolha, e o robô se encaixará em seu fluxo como outro dispositivo de incompatibilidade, e o robô permanecerá ocioso enquanto seu melhor soldador o programa manualmente (um intervalo no qual a produtividade da fabricação pode aumentar ou pode cair.
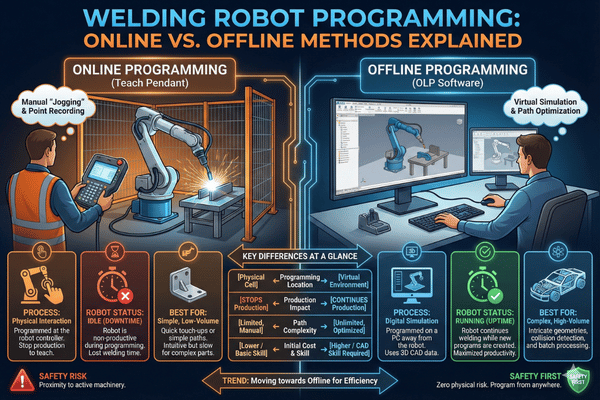
Método 1: Programação de Pingentes Teach How It Works, Pros and Cons
Ensinar pendant (alternadamente ensino) antecede todas as outras opções e continua a ser o processo mais comumente implementado Usando um handset portátil conhecido como o teach pendant (ensinar a programação on-line) é fisicamente percorrido pelo operador através de cada ponto de solda Em cada posição, o operador captura as coordenadas, ângulos da tocha, vetor de aproximação e o equilíbrio entre interpolação conjunta (rotação de eixo livre) e interpolação linear (movimentos retos) Quando todos os pontos foram coletados, o operador determina os pontos de partida/parada do arco, define os níveis dos parâmetros de solda (taxa de alimentação do fio, amperagem, tensão e velocidade de deslocamento) e tenta uma corrida a seco para determinar o quão bem ele está se unindo.
Antes de qualquer um destes operador deve primeiro confirmar a localização TCP e orientação robôP, o Centro de Ferramentas define a posição exata da tocha em uma célula relativa ao pulso do robô Se a localização TCP desvia da posição verdadeira por 12 mm, cada posição programada herda esse erro Após a calibração da célula, o operador pode precisar tocar uma posição ou duas se o ângulo da tocha mudou durante uma troca de forro Recalibração TCP é necessária após cada substituição da tocha ou colisão.
Ensine Pendant a dar uma olhada
Prós: Entendido por soldadores experientes Não são necessários dados CAD Compatível com qualquer processo de solda (GMAW, GTAW/TIG, SAW).Boa consistência uma vez dominada Menor custo de capital de software.
Contras: Produção de paradas enquanto programando uma forma complexa em soldas de ranhura multi-passagem pode tomar todas as paradas de mudança em aço estrutural, componentes estruturais A qualidade é totalmente dependente da experiência do operador Difícil de migrar arquivos de programa entre variantes de peças Para uma peça com muitos locais de solda compartilhando um tipo de junta comum, a programação rapidamente fica sem graça.
Dependendo de sua aptidão, um operador de solda treinado requer 40 horas de experiência prática de soldagem antes de poder ensinar um ciclo de soldagem completo sozinho Esse treinamento inclui corrida de robôs, orientação de sistema de coordenadas, sequências de início de arco e interface de fonte de energia Para pisos de lojas que utilizam processos de soldagem a arco MIG ou TIG em peças simples e repetidas, ensinar programação pendente continua sendo uma seleção testada e comprovada.
Método 2: Programação Offline (OLP) (Geração de Caminho Baseada em CAD)
Os deslocamentos do OLP trabalham fora do chão de fábrica em um computador O programador carrega um arquivo de origem CAD da peça de trabalho no software OLP, identifica digitalmente os locais das ranhuras e os parâmetros de solda e executa uma simulação completa, detecção de colisão, estudo de acessibilidade, estimativa de tempo de ciclo. Quando o programa virtual se ajusta à conta, ele é exportado para o controlador do robô e baixado para o sistema de soldagem real. Programadores adicionais podem sincronizar vários robôs em células de trabalho compartilhadas, posicionadores coordenados, evitando colisões braço a braço.
Sua principal vantagem: seu robô pode continuar soldando enquanto sua equipe prepara o próximo. Se a sua loja realizar vários turnos, este ponto por si só pode ser um incentivo suficiente para investir na tecnologia.
Visão geral da programação off-line
Prós: Sem atraso na produção Lida com geometrias 3 D complexas Examina as possibilidades de colisão na simulação antes de prosseguir no chão de fábrica Armazenamento do programa, controle de versão, recursos de reutilização Integra-se com as ferramentas CAD atuais.
Contras: Practition deve ter acesso a arquivos CAD 3 D precisos para cada parte nem sempre disponível em lojas de fabricação legada A equipe deve um praticante qualificado em metalurgia, bem como em cinemática de robôs A etapa de desfasamento de tempo enquanto se traduz em condições de simulação de chão de fábrica 1530 minutos por parte para sensores e acessórios de ajuste fino.
A execução de OLP é mais adequada para uma loja com departamento de controles e um pipeline CAD estabelecido Se suas peças vierem em plasma cortado à mão e as tolerâncias estiverem na faixa de 3 mm, a simulação para a realidade causará insatisfação Uma abordagem híbrida de pendente de ensino para juntas de solda críticas combinada com OLP para costuras mais simples.
Antes de selecionar o software de programação de robôs, verifique se a plataforma que executa o programa suporta as marcas de soldadores robóticos que aparecem no chão de fábrica Os principais fabricantes de robôs como FANUC, ABB e KUKA usam cada um sua própria linguagem de controlador, e nem todo pacote OLP traduz igualmente Algumas lojas trazem inspetores de soldagem certificados no início do ciclo de programação para garantir que os programas de solda simulados construam o código corretamente antes que o primeiro arco seja atingido evitando retrabalho caro na célula de soldagem que se segue Essa disciplina produz um ROI tremendo quando impede até mesmo um único lote de peças rejeitadas.
Método 3: Programação Adaptativa Sem (Less)/Visão Adaptativa: Baseada em Teach e Baseada em IA
A programação sem ensino (às vezes chamada de programação sem ensino ou adaptativa) elimina a necessidade de modelos manuais de ensino e CAD. Ela emprega sensores de visão de luz estruturada 3 D ou scanners de linha a laser para escanear o trabalho, localizar costuras, determinar ângulos de tocha e gerar automaticamente todo o caminho de soldagem sem pré-programação. Um operador carrega a peça de trabalho, pressiona para iniciar e o robô descobre.
Isso não é ficção científica A tecnologia Seam-track existe há décadas, mas versões mais antigas apenas modificaram um caminho pré-ensinado A tecnologia de soldagem sem ensino de hoje determina o caminho pela geometria da junta encontrando costuras mesmo em diferentes locais da peça de trabalho (escaneando cada junta (filé, topo, colo, ranhura), escolhendo os parâmetros de soldagem corretos e realizando a trama; nenhum programa dedicado é necessário para essa peça.
Visão geral da programação sem ensino
Prós: Tempo de programação quase zero por peça Permite a variação parte-a-parte e fluência de tolerância; adequado para execuções de alta mistura/baixo volume, onde o trabalho tem muitos locais de solda Habilidade mínima do operador para geração de caminho Interface de usuário intuitiva, pois a tecnologia do robô lida com o detalhe.
Contras: Custos de capital mais altos para hardware de visão A condição de iluminação tem que permanecer estável, e o trabalho deve ser razoavelmente limpo e plano para o scanner trabalhar com consistência Menos base instalada empírica do que os sistemas pendentes de ensino A junta deve ser reconhecível pelo sensor (cantos internos), lacunas ou juntas complexas apresentam problemas.
Observamos lojas justificam um tempo de caminho de 45 minutos até menos de 2 com sistemas sem ensino Mas o benefício real não é apenas o tempo de ciclo (o tempo de ciclo) é que um operador menos temperado pode operar a célula Em um mercado que experimenta escassez contínua de soldador, isso é mais valioso do que o tempo de ciclo bruto Quando a soldagem manual, mesmo a soldagem robótica básica já produz maior repetibilidade e rendimento em aplicações de soldagem de alto volume.
Comparação de tempo de programação: mesma parte, três métodos
Pelos números. aqui está o que é preciso para programar a mesma peça usando cada técnica: um suporte de aço estrutural padrão (placa de 8 mm, soldas de 4 filés, cerca de 600 mm de comprimento de costura).A loja usou um operador experiente ou programador (não um aluguel de primeiro dia).
| Dimensão | Ensinar Pingente | Offline (OLP) | Ensinado |
|---|---|---|---|
| Tempo Programação | 2 4 horas | 30 60 min (computador) + 15 30 min (calibração) | <2 minutos |
| Tempo de inatividade da produção | 2 4 horas (ro para) | 15 30 min (somente calibração) | Perto de zero |
| Nível de Habilidade do Operador | Operação do robô + conhecimento de soldagem | CAD/CAM + soldagem + cinemática do robô | Compreensão básica do processo de soldagem HMI + |
| Mudança para Nova Variante | Re-re-total (1 1 4 horas de ensino) | Novo modelo CAD necessário; reprogramar + recalibrar | Automático (a) rescans a nova parte |
| Modelo CAD necessário? | Não | Sim | Não |
| Resultado de qualidade da solda | Solda consistente uma vez programada corretamente | Solda consistente depende da precisão da calibração | Solda consistente com correção adaptativa em tempo real |
| Melhor ajuste | Low-mix /high-volume (poucos números de peça, longas tiragens) | Mistura média com pipeline CAD existente | High-mix /low-volume (muitos números de peça, tiragens curtas) |
Nota: Os tempos assumem um operador treinado/programador. A configuração de primeira viagem é executada 2 × um processo de solda mais longo. GMAW (MIG) em aço macio. Alcance e acesso do robô assumidos adequados para todos os métodos Dados de desempenho baseados em benchmarks de campo publicados por ISO 9283 (critérios de desempenho do robô) condições de teste.
Através da soldagem robótica, uma relação distinta aparece: ensinar trabalhos pendentes quando as trocas são poucas e distantes entre si O OLP ganha quando você tem CAD e pode lidar com a etapa de calibração Teachless é ideal quando a variedade de peças é alta e seus operadores não podem se dar ao luxo de perder horas de produção dispendiosas para a programação Em qualquer caso, a capacidade de programar de forma rápida e precisa diferencia as células de automação produtiva de ornamentos de piso caros.
Quais habilidades sua equipe precisa? Requisitos de treinamento por método
O verdadeiro desafio aqui não é escolher um candidato que lhe dará uma série de pressionamentos de botão É o fornecimento de um candidato que consegue absorver tanto o processo de soldagem E o robô simultaneamente Cada solução de programação altera esta equação de forma diferente.
| Área Habilidade | Ensinar Pingente | Offline (OLP) | Ensinado |
|---|---|---|---|
| Duração do treinamento | 1 2 (40 semanas 80 horas) | 4 8 semanas | 2 3 dias |
| Conhecimento Soldagem | Necessário, definir parâmetros de arco manualmente | Necessário o software deve definir parâmetros de solda em | Um sistema útil, mas menos crítico, sugere parâmetros |
| Operação Robô | Deve aprender jogging, quadros coordenados, sinais de E/S | Deve compreender a cinemática, atingir limites, singularidades | IHM básica: programa de carga, início da imprensa, ciclo do monitor |
| Habilidades CAD/Software | Não necessário | Necessário 3 D CAD + OLP proficiência em software | Não necessário |
| Dificuldade de pessoal | Modere a operação de um soldador que possa aprender a operação do robô | Alta combinação de CAD + soldagem robótica | O operador de manuseio de baixo custo pode operar o celular |
Ao avaliar sistemas de soldagem robótica de diferentes fabricantes de robôs, o custo de treinamento é frequentemente subestimado Um robô pode custar $80 K-$200 K, mas perder seu único programador treinado para um concorrente pode ficar ocioso da célula por semanas até que uma substituição seja encontrada e treinada Os sistemas Teachless eliminaram esse ponto único de falha por provisionamento em massa para o maior número possível de operadores As lojas que produzem investimento contínuo em treinamento fornecem certificação de soldagem para seus programadores de robôs programarem pessoal mais duradouro e menos fugas de qualidade.
Também é aqui que a simplicidade da programação torna-se um fator na avaliação de configurações de robôs de soldagem Se sua qualidade de solda interna ou American Welding Society orienta sua equipe, a simplicidade de programação determina a eficiência com que um novo programador de robôs entra em operação.
Como o sistema sem ensino de Zhouxiang reduz o tempo de programação
Zhouxiang é insistente robôs soldagem use sensores de visão 3 D com rastreamento de costura a laser para identificar automaticamente a geometria da peça de trabalho e gerar caminhos de solda em tempo real, sem arquivos CAD, sem pingente de ensino, sem programas de solda pré-carregados para cada número de peça.
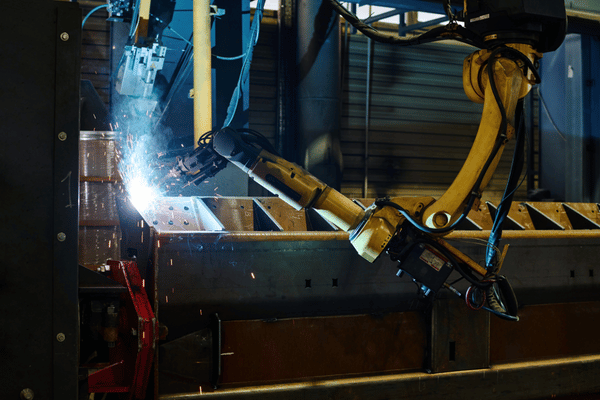
Veja como ele se desenrola praticamente: o operador carrega uma peça de trabalho de aço no acessório, pressiona a partida na IHM da tela sensível ao toque e o sensor de visão varre a peça dentro da célula de trabalho do robô O sistema identifica o tipo de junta (fillet), butt, lap (lapa) calcula o vetor de aproximação da tocha, define os parâmetros de soldagem dependendo da espessura do material e do tipo de junta e inicia a soldagem Em menos de dois minutos da carga da peça até a greve do arco, ele está completo.
Se sua loja processa aço estrutural, quadros de equipamentos pesados ou qualquer tipo de trabalho de produção em que a geometria da peça varia de lote para lote, esse tipo de soldagem robótica aniquila o gargalo de programação Seus soldadores se concentram na configuração do dispositivo elétrico e na inspeção de qualidade, não gastando horas em um pingente de ensino Se você procurar programar um robô de soldagem para componentes que funcionam uma vez e nunca mais, essa é a única maneira de fazê-lo economicamente.
Pronto para ver a programação sem ensino em ação?
Solicite uma consulta personalizada para determinar qual método de programação de soldagem robótica melhor se alinha aos requisitos de produção da sua equipe.
Erros de programação que custam tempo às lojas e qualidade de solda
Através da nossa experiência de trabalho com inúmeras implantações de soldagem robótica, observamos as mesmas armadilhas em todas as lojas. Aversão desses resíduos em tempo real economizará semanas e semanas de agravamento, independentemente do método escolhido.
- Não executando uma rotina de calibração TCP. Cada troca de tocha, mudança de forro ou impacto move o ponto central da ferramenta Execute a rotina de calibração antes de programar um único caminho de solda, não como o último passo antes de perceber que está muito fora do alvo.
- Aplicando um único conjunto de configurações de solda em diferentes configurações de juntas Um cronograma de solda definido para soldas de filete não produzirá a mesma qualidade em juntas de topo, ranhura ou sobreposição Combine a velocidade e a tensão de alimentação do fio com cada configuração de junta de forma independente O controle adequado da velocidade e da tensão de alimentação é o que separa as soldas aceitáveis das rejeições.
- Não leva em conta os movimentos de corte de ar entre as soldas Caminhos de transição ruins levam a problemas de colisão de fixação e fixação Planeje o caminho de corte de ar do robô com a mesma diligência que o caminho de soldagem.
- Falhas em programas de solda de backup Uma falha do controlador e dezenas de horas de trabalho de pingente de ensino se foi Manter um registro de registro ou mudança de cada programa de robô e backup em unidades de rede, não apenas no controlador.
- Treinamento apressado. Um novo programador robô que brisa através dos fundamentos irá produzir soldas inconsistentes e máquinas de dano Planeje gastar todo o tempo recomendado para o seu sistema; os programas para o seu robô são tão bons quanto a pessoa que os escreve.
Perguntas frequentes
Quanto tempo demora a programar um robô de soldadura?
Completamente depende da abordagem Ensinar a geração de caminho pendente para uma peça relativamente simples com 8-12 pontos de solda leva cerca de 2-6 horas de tempo prático Offline cria o caminho em 30-90 minutos de tempo de computador, mais 15-30 minutos de calibração no sistema A geração de caminho do sensor de visão sem ensino pode acontecer em menos de 2 minutos por peça, sem necessidade de ensino do operador Coloque de outra forma: uma loja de trabalho high-mix com muitas peças pequenas pode ser offline programado em uma única tarde, versus muitas horas para ensinar método pendente.
Você pode programar um robô de soldagem sem experiência em codificação?
Absolutamente os parâmetros do Teach não usam linguagem de programação Os caminhos do Teach pendant usam passagem de ponta de borda; tudo o que é necessário é a soldagem O Teachless requer software de sensor de visão para gerar caminhos de soldagem a partir do modelo de peça A habilidade necessária apenas para caminhos offline é a programação CAD/CAM.
O que é programação offline para robôs de soldagem?
A programação offline (OLP) envolve a criação do caminho fora da fábrica, com software especial baseado em PC usando um modelo CAD da peça de trabalho em vez de guiar o robô no chão de fábrica O programador importa o modelo CAD, localizando os locais da costura de solda, definindo parâmetros de soldagem, simulando para colisão e, em seguida, carregando o caminho para o controlador Nenhum tempo de inatividade da máquina é necessário durante a criação do programa.
O que é calibração TCP e por que isso importa?
TCP (Tool Center Point) é a localização física da ponta da tocha de soldagem para o pulso do robô Mesmo pequenos desvios tão pequenos quanto 1-2 mm resultarão em todas as soldas faltando o alvo da costura (feixe ou subcote) Sempre recalibre após substituições ou colisão da tocha.
Como funciona a programação de soldagem sem ensino?
A programação sem ensino sem ensino usa sensores de visão (lasers ou câmeras estruturadas light-D) ou sensores de soldagem geralmente (as câmeras estruturadas light (as) para escanear a peça e encontrar automaticamente os pontos de costura O sistema de visão calcula os ângulos da tocha e os parâmetros de soldagem e gera um caminho de solda tudo automaticamente O operador humano apenas carrega peças e pressiona Iniciar no ensinar caminhos pendentes ou modelos CAD necessários Uma aplicação ideal para produção de alta mistura e alta mudança.
Que treinamento os operadores precisam para soldagem robótica?
Varia pelo método Ensinar os operadores pendentes geralmente precisam de 40-80 horas (1-2 semanas) de aprendizagem focada jogging, TCP calibração e solda parâmetro de ajuste Programa offline exigem muito mais tempo 4-8 semanas robô aprender CAD-to-path software, simulação, e cinemática Ensinar os operadores do sistema precisam de apenas 2-3 dias, porque o caminho é gerado pelo sistema de visão e o operador carrega peças, configura acessórios e opera funções básicas HMI Também incluem tempo para atualizadores periódicos, particularmente após atualizações de software ou adição de novos processos de soldagem a arco, como MIG pulsado ou CMT na célula A maioria dos integradores incluem tempo de treinamento inicial na taxa de integração, então verifique o que está incluído no pacote antes de assinar.
Encontre o método de programação certo para sua loja
Os engenheiros da Zhouxiang analisarão os tipos de peças e a taxa de produção das habilidades da sua equipe e recomendarão o método ideal.
Referências e fontes de dados
- Federação Internacional de Robótica (IFR), Relatório Mundial de Robótica 2024 Número de robôs industriais instalados em todo o mundo.
- ISO 923:1998 8 Manipulação de robôs industriais Critérios de desempenho e método de teste relacionado.
- ISO 18-102011 (SIG): Robôs e robôs industriais (Requisitos de segurança para robôs industriais).
- Sociedade Americana de Soldagem (AWS), Dados de Força de Trabalho de Soldagem e Estatísticas (Previsão para Soldador Avançado Curta-Metragem.
- ISO/TS0666 2016 Robôs e robôs industriais 15 robôs industriais Colaborativos (agora ISO 102:2025).


