
Entre em Contato com Zhouxiang
![Robô cantilever de 7 eixos como funciona, especificações e aplicativos [2026]](https://zxweldingrobot.com/wp-content/uploads/2026/04/7-Axis-Cantilever-Robot-How-It-Works-Specs-Applications-2026.webp)
Robô cantile eixo A7 adiciona um trilho de aterramento linear a um braço de soldagem padrão 6 eixos, estendendo seu envelope de trabalho de um ponto fixo para uma zona contínua 624. Para fabricantes de estrutura de aço soldando longos H-beams, colunas de caixa, vigas de telhado este axissimuplifica extra o processo, removendo a necessidade de reposicionar workpieces ou executar vários robôsprocessando uma máquina com todo o comprimento da peça, reduzindo a eficiência de soldagem em membros estruturais longos Este mergulho profundo examina como o sistema funciona, como as especificações reais parecem em todos os fabricantes e como decidir se comprar a7th axis é um bom investimento para sua loja.
Especificações rápidas: Robô de soldagem cantilever de 7 eixos
| Eixos Totais | 6 (braço do robô) + 1 (trilho subterrâneo) = 7 |
| Repetir a Precisão de Posicionamento | ±0,05 mm (varia de acordo com o fabricante; alguns modelos ±0,1 mm) |
| Carga útil do robô | 61 kg (modelo dependente) |
| Alcance do braço | 1,4402,010 mm |
| Comprimento do trilho terrestre | 6 m (custom) |
| Velocidade Soldagem | Até 5 m/min |
| Programação | Livre de ensino (Tekla, SolidWorks, importação UG) ou pingente de ensino |
| Classificação de proteção | IP56 (1J2) /IP67 (J3J6) |
O que é um robô cantilever de 7 eixos?
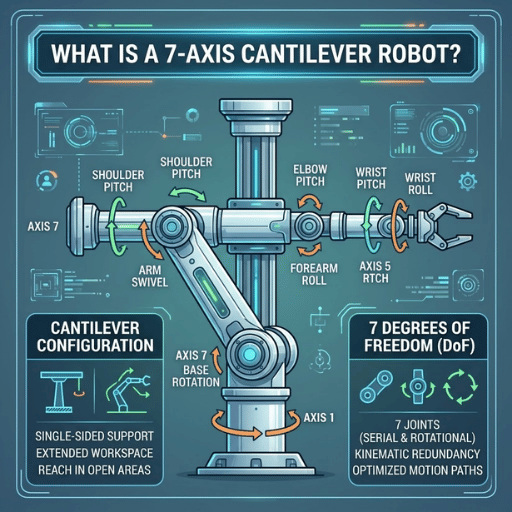
Um robô de 7 eixos é um sistema industrial que monta um braço robótico de 6 eixos em um trilho térreo motorizado 7o eixo usando uma estrutura cantilever (viga suspensa). Seu design permite que o robô seja reposicionado acima e ao lado da peça, mantendo a área do piso diretamente abaixo dela aberta para logística de pontes rolantes.
Na prática, o “ do eixo 1 causa confusão na indústria. Um punhado de fabricantes OTC DAIHEN com sua série FD-V implementam o 7o eixo como uma segunda junta rotacional dentro do próprio braço do robô, abrindo pontos de interferência curtos e outras áreas de difícil acesso Em uma configuração cantilever, o 7o eixo é sempre um trilho linear ao nível do solo que estende a zona de trabalho do robô ao longo do comprimento da peça. Ambas as abordagens abordam a mesma questão fundamental: fornecer mais alcance e flexibilidade do que um robô pedestal fixo de 6 eixos.
Estruturalmente, o cantilever é a principal diferença dos sistemas de soldagem estilo pórtico Os robôs de pórtico andam sobre trilhos aéreos que percorrem toda a largura e comprimento do espaço de trabalho e exigem suporte estrutural pesado e estruturas de teto fortes Um robô cantilever simplesmente se estende de um lado, liberando mais espaço e facilitando a integração nas linhas de produção existentes, onde o acesso à ponte rolante não deve ser bloqueado.
💡 Distinção Chave
“O robô de ”7 eixos” pode ser interpretado de forma diferente dependendo das especificidades. Em sistemas de soldagem cantilever, o 7o eixo é sempre um trilho linear terrestre; em robôs articulados como a série OTC DAIHENs FD-V, o 7o eixo é uma segunda junta rotacional no próprio braço.
Como funciona a tecnologia de soldagem sem ensino?

A soldagem sem ensino substitui a programação manual de pedantes de ensino pela geração automática de caminhos de solda A programação de robôs guiados por operador pode levar um tempo considerável; uma peça típica que requer 175 costuras individuais pode facilmente exigir mais de 35 horas de ensino manual Com software livre de ensino, o sistema importa o modelo digital, analisa as posições de solda e gera o caminho completo em meros minutos.
Alimentado por visão de IA e software de programação offline, o processo consiste em três etapas:
- Importação de projeto 3 D: O projetista envia arquivos de projeto estrutural diretamente da Tekla Structures, SolidWorks e UG (NX).A geometria CAD, posições de juntas e notas de solda são lidas automaticamente.
- Detecção de Seam baseada em visão: um scanner a laser (como o rastreador a laser CP350 V usado em sistemas Zhouxiang) faz varredura de linha inteligente para localizar as posições reais da costura de solda na peça de trabalho física Isso compensa as tolerâncias de fabricação (a diferença entre a posição indicada pelo modelo 3 D para uma junta e a posição real no chão de fábrica).
- geração Automática de Caminho: Quando o sistema localiza as coordenadas da costura, ele as compara com a biblioteca de processos de soldagem e seleciona os parâmetros apropriados para velocidade de alimentação do fio, tensão, velocidade de deslocamento e ângulo da tocha A partir daí, o robô executa toda a sequência de solda sem intervenção manual.
Verbótica, uma empresa especializada em programação de robôs off-line, afirma que seu sistema diminuiu o tempo de programação para uma peça de 175 soldas de mais de 35 horas (ensino manual) para apenas 1,5 horas Em toda a indústria, os sistemas livres de ensino fornecem um fator de programação 5-10 x mais rápida em comparação com a operação tradicional de teach-pendant.
O que é um 7o Eixo para Robôs?
O 7o eixo em cantilever robô soldagem é um trilho motorizado, de nível que permite que todo o corpo do robô se desloque ao longo do comprimento da peça de trabalho Ao contrário das seis juntas do braço do robô (que controlam a posição e orientação da tocha de soldagem), o eixo 7 th fornece translação (translation) a capacidade de viajar 6 a 24 metros ao longo de uma trilha reta Estendendo a zona de trabalho é a característica definidora que torna possível a cobertura de um único robô de membros estruturais longos O trilho de solo emprega um sistema servo-acionado de cremalheira e pinhão ou parafuso esférico com controle de movimento sincronizado para que o robô possa soldar continuamente enquanto viaja ao longo do trilho sem parar para se reposicionar.
️ Conceito errôneo comum
Livre de ensino não significa tempo de configuração O posicionamento da peça de trabalho ainda é feito por operadores experientes por causa do design do dispositivo elétrico, colocação da peça de trabalho e validação do parâmetro do processo de solda O que é eliminado são as horas de programação de caminho ponto a ponto no pendente de ensino a parte mais demorada e estúpida do processo.
Especificações Técnicas Que Importam
Gama de especificações para robôs cantilever de 7 eixos varia amplamente entre os fabricantes Abaixo está uma comparação puxando dados de dois modelos Zhouxiang, mais o OTC DAIHEN FD-V6 S, para mostrar a distribuição do mercado.
| Parâmetro | Zhouxiang ZXR12-2010 | Zhouxiang ZXR10W-1440-D | OTC DAIHEN FD-V6S |
|---|---|---|---|
| Eixos | 6 + trilho terrestre | 6 + trilho terrestre | 7 (rotacional integrado) |
| Carga útil | 12kg | 10kg | 6kg |
| Alcance do braço | 2.010mm | 1.440mm | 1.427mm |
| Repetir Precisão | ±0,05mm | ±0,05mm | ±0,08mm |
| Peso do robô | 313kg | 210kg | 145kg |
| Proteção (pulso) | IP67 | IP67 | IP67 |
| Capacidade Potência | 4,5 kVA | 4,5 kVA | 3,0 kVA |
| Design Pulso | Oco (roteamento de cabo interno) | Oco (roteamento de cabo interno) | Oco |
Nota de Engenharia
IP67 nas junções do pulso (J3-J6) é uma obrigação em aplicações da soldadura Estas junções operam mais próximo ao arco e são expostas aos respingos da solda, à poeira de moedura, e ao resíduo do gás de proteção IP56 nas junções de base (J1-J2) é suficiente porque a altura de montagem do modilhão mantém-nas livres dos respingos da zona da soldadura Todos os modelos devem encontrar-se ISO 10218-1:2025, o padrão internacional revisado para segurança de robôs de solda, que exige funções de parada monitoradas com classificação de segurança e modo operacional.
Vale a pena notar é o design do pulso O roteamento interno do cabo elimina o feixe de cabos externos em robôs mais antigos que envolvem o pulso Isso evita a interferência entre o cabo da tocha de soldagem e a peça de trabalho durante caminhos de movimento complexos (causa comum de paradas não planejadas e colisões de tochas em sistemas de pulso não oco.
Robô de soldagem de 7 eixos vs 6 eixos: o que o eixo extra muda

Um robô típico de soldagem de 6 eixos aparafusado a um pedestal fixo tem um envelope de trabalho definido por seu envelope de soldagem de braço 0 geralmente em torno de 1,4 a 2,00 mm da base Para qualquer peça de trabalho mais curta que o alcance do braço, isso funciona bem Quando a peça de trabalho se estende além do alcance do robô embora digamos um H-beam de 8 metros que precisa ser fabricado (o sistema de eixo 6 atinge um limite rígido O fabricante tem que reposicionar a peça de trabalho usando pontes rolantes, adicionar um segundo robô ou conectar um posicionador para girar o trabalho ao alcance.
Com um trilho de aterramento do 7o eixo, a história muda. Um único robô atravessando um trilho de 12 metros pode soldar todo o comprimento de uma viga H de 8 metros em uma operação contínua, mantendo o ângulo ideal da tocha sem paradas manuais de reposicionamento.
the Vantagens do 7o Eixo
- Abrange 62 m zona de trabalho com um único robô
- Elimina o equipamento do posicionador e reduz o espaço no chão
- Mantém o ângulo ideal da tocha em costuras longas sem interrupção
- Evita interferências reposicionando todo o braço em torno de obstáculos
- Permite o carregamento da peça em lote. O craniano transporta várias peças para o trilho de uma só vez, o que pode melhorar o tempo de ciclo
– Limitações
- Maior custo de equipamento (sistema ferroviário, servo drives, cabeamento adicional)
- O alinhamento e a calibração do trilho precisam a instalação da precisão (±0.1 mm sobre o comprimento total)
- Manutenção do trilho de terra: desgaste da cremalheira-e-pinhão, limpeza do trilho, programação da lubrificação
- Período inicial de comissionamento mais longo versus instalação de montagem fixa
- Apenas o movimento linear não fornece a destreza rotacional de uma 7a junta integrada
“Os robôs de sete eixos têm a capacidade de se deitar e alcançar em torno de peças e obstáculos Eles são ideais para aplicações onde o posicionamento de peças não está disponível, e são capazes de manter o ângulo ideal da tocha e atitude em peças mais longas sem compromisso.”
Robôs Feitos Certo, Visão Geral Técnica dos Robôs de Soldagem Seven-Axis
Uma oficina de fabricação de aço estrutural mostra a diferença claramente Imagem uma instalação processando vigas H de 12 metros com soldas de filé em ambos os flanges Com um robô fixo de 6 eixos, cada viga passa por pelo menos dois ciclos de reposicionamento (as talhas de guindaste e gira a viga, as re-fixagens do operador e o robô re-calibra seu ponto inicial Cada ciclo consome 15 a 25 minutos de tempo sem soldagem Agora imagine um robô cantilever de 7 eixos em um trilho de 15 metros O feixe é colocado uma vez, e o robô solda o comprimento total continuamente Através de um deslocamento de 20 vigas, a economia de reposicionamento sozinha recupera 58 horas de tempo produtivo de soldagem.
💡 A regra de comprimento da peça
Se sua peça de trabalho típica está sob 3 metros, um padrão de 6 eixos posicionador lida com a maioria das aplicações apenas fina Sobre 3 metros, reposicionamento manual torna-se o gargalo de produção (gargalo) e o 7 o eixo começa pagando por si mesmo Este é o limite de decisão central entre configurações de montagem fixa e cantilever.
Aplicações: Onde 7 Eixos Robôs Cantilever Excel

O robô de soldagem cantilever se adapta melhor às indústrias que constroem peças de aço longas e pesadas com padrões de solda uniformes Alcance estendido, programação sem ensino e identificação automática de costura fazem uma combinação forte para aplicações com muita variação de peças de trabalho, mas tipos de solda padronizados.
| Indústria | Peças de trabalho típicas | Tipos Solda | Comprimento do trilho |
|---|---|---|---|
| Estrutura de Aço Fabricação | Vigas H, colunas de caixa, vigas de telhado, placas de reforço | Filé, bumbum, multi-passagem | 6 m |
| Construção naval | Seções de casco, conjuntos de convés, anteparas | Filé, ranhura, aderência | 12 m |
| Construção Ponte | Vigas de placas, armações cruzadas, placas de emenda | Bunda, filete, multi-passagem | 8 m |
| Equipamento de energia | Quadros de caldeiras, suportes para vasos de pressão, plataformas de equipamentos | Filé, ranhura | 6 m |
A fabricação de estruturas de aço é responsável pela maior parcela de implantações de robôs cantilever Componentes do tipo aberto, como vigas H com placas de reforço, cachorros e suportes purlin, padronizaram geometrias de juntas que o sistema livre de ensino lida com a entrada mínima do operador Sob o ISO 10218-2:2025 estrutura de células robóticas, essas aplicações pertencem ao grupo de células de soldagem automatizadas que exigem funções de parada monitoradas com classificação de segurança e zonas operacionais definidas.
O crescimento global do mercado de soldagem robótica confirma essa tendência De acordo com a análise da indústria, o mercado deverá atingir cerca de USD20,78 bilhões até 2032, em comparação com USD10,66 bilhões em 2025, devido ao aprofundamento da escassez de mão de obra para soldagem qualificada e à crescente demanda por automação em aço estrutural e construção naval Dentro desse mercado, as configurações de cantilever com tecnologia livre de ensino estão entre os segmentos de crescimento mais rápido, particularmente nos centros de fabricação da Ásia-Pacífico, onde o integração de sistemas gêmeos digitais e visualização de dados em tempo real está avançando na inteligência de produção.
Alguns fabricantes também integram a estação de trabalho de soldagem de robô cantilever com máquinas de corte a laser a montante uma linha de produção de corte para solda Peças diretamente do corte para a zona de soldagem, reduzindo as etapas de manuseio de materiais embora isso exija um espaço cuidadoso no chão e programação de produção sincronizada.
Como escolher o robô cantilever de 7 eixos certo para sua oficina
Se um robô cantilever de 7 eixos faz sentido depende de algumas variáveis mensuráveis Abaixo está uma estrutura mapeando suas condições de produção para a configuração certa.
Estrutura de decisão: configuração por comprimento da peça
- Comprimento da peça de trabalho <3 m 6-eixo robô com um posicionador padrão deve ser suficiente Adicionar um 7 o eixo nesta escala não entregar ganhos de produtividade proporcionais.
- Comprimento da peça de trabalho 38 m 7 robô do modilhão com um trilho à terra de 6 m. Este é o ponto doce onde o eixo extra remove o reposicionamento e começa a si mesmo dentro de 12 pay cant8 meses.
- Comprimento da peça de trabalho 815 m 7 eixo cantilever estendido do trilho (8.5 m).Garantir que a fundação está nivelada dentro de ±0 mm pelo medidor para a precisão do alinhamento do trilho.
- Comprimento da peça de trabalho >15 m 9 eixos ou configuração de pórtico de 8 eixos ou 9 eixos, ou robôs cantilever duplos trabalhando em conjunto em um trilho compartilhado.
- Tamanhos mistos de peças (produção variável) 7 o software do modilhão do ensino-7 com o software livre do ensino fornece a maior flexibilidade cada parte nova exige somente um arquivo do modelo 3 D, horas de reprogramação.
- ✔
Meça o comprimento máximo da peça de trabalho 7o número único determina se o 7o eixo é justificado - ✔
Identifique seus tipos de solda (multi-passagem), butt, groove; confirme o suporte do robô e da fonte de energia em todos os processos necessários - ✔
Verifique o espaço do piso e a folga do guindaste (o cantilever se estende de um lado; verifique se a saliência não obstrui os caminhos existentes do guindaste - ✔
Avaliar as necessidades de programação Se você usar a Tekla Structure para detalhamento de aço, a integração sem ensino economiza um tempo de programação significativo - ✔
Considere layouts de estação dupla (enquanto o robô solda de um lado, os operadores carregam a próxima peça do outro lado, maximizando o tempo de arco ligado
Para lojas de fabricação que já usam fluxos de trabalho de design digital (Tekla, SolidWorks ou UG), a capacidade livre de ensino é o fator decisivo Seu software gera automaticamente caminhos de soldagem a partir de modelos de design, portanto, novos produtos ou revisões de design não exigem reprogramação manual Para lojas que ainda dependem de desenhos manuais ou CAD 2 D, a abordagem teachpendant ainda funciona, mas sem a vantagem de velocidade que justifica o investimento do 7 o eixo.
Gostaria de provar um robô cantilever de 7 eixos para sua linha de produção?
Ver especificações do robô de soldagem cantilever →
Ou solicite um orçamento gratuito usando as especificações da sua peça de trabalho com volume de produção.
Perguntas frequentes
![Robô cantilever de 7 eixos como funciona, especificações e aplicativos [2026]](https://zxweldingrobot.com/wp-content/uploads/2026/04/7-Axis-Cantilever-Robot-How-It-Works-Specs-Applications-2026-1.webp)
Q: Quantos eixos tem um robô de solda cantilever?
Ver Resposta
Um robô de soldagem cantilever padrão geralmente tem 7 eixos: 6 eixos no braço do robô (base, ombro, cotovelo e 3 articulações do pulso) mais 1 eixo linear do trilho de aterramento Algumas configurações avançadas adicionam um 8 o eixo (rotação cantilever) ou 9 o eixo (posicionador de peça de trabalho), mas a maioria das estações de trabalho de soldagem cantilever funciona em 7 eixos coordenados.
Q: Qual é a diferença entre um cantilever e um robô de soldagem de pórtico?
Ver Resposta
Um robô cantilever se estende de um lado em uma viga saliente, deixando o piso livre para acesso ao guindaste Um robô de pórtico corre sobre trilhos aéreos em toda a área de trabalho, precisando de mais suporte estrutural e altura do teto Os arranjos cantilever tendem a se encaixar melhor em oficinas mais antigas com restrições de guindaste; os sistemas de pórtico lidam com requisitos de alto volume em instalações construídas especificamente com peças de trabalho muito longas ou muito largas.
Q: Pode um robô cantilever de 7 eixos soldar sem programação manual?
Ver Resposta
Sim, quando o sistema tem software livre de ensino instalado Ele importa modelos 3 D da Tekla, SolidWorks ou UG, então usa visão a laser para escanear a peça de trabalho e localizar automaticamente as posições da costura de solda A partir daí, o software gera o caminho de solda completo e os parâmetros do processo sem programação manual teach-pendant A configuração da fixação e a validação dos parâmetros do processo ainda exigem o envolvimento do operador.
Q: Que tamanho da peça de trabalho pode um cabo de robô cantilever de 7 eixos?
Ver Resposta
O comprimento máximo da peça de trabalho é uma função do trilho de terra: a maioria dos trilhos padrão está entre 6 e 15 metros, os trilhos personalizados podem ser até 24 metros A largura da peça de trabalho é limitada pela saliência geral do cantilever e pelo alcance do braço (máximo de 2,4 metros da linha central do trilho).O peso da peça de trabalho é uma função da capacidade do piso ou do acessório: não do robô, porque a estrutura do cantilever não carrega a carga da peça de trabalho.
Q: Quão preciso é um robô de soldagem cantilever de 7 eixos?
Ver Resposta
A precisão do posicionamento repetido varia de 0,05 mm a 0,1 mm usando cada fabricante e o modelo a-priori. Isso se aplica às juntas do braço do robô; a pilha do trilho de aterramento fornece seu próprio limite para repetir a precisão do posicionamento (declarada separadamente).Para as aplicações de soldagem, a precisão da repetição de 0,1 mm é aceitável para a maioria das operações de solda de filete e topo em aço estrutural.
P: Quais formatos de arquivo o software de soldagem livre de ensino suporta?
Ver Resposta
A maioria dos sistemas livres de ensino lê arquivos IFC da Tekla Structures e arquivos STEP/IGES da SolidWorks Alguns sistemas também aceitam formatos nativos da Siemens NX (UG).Os arquivos DSTV (NC) comumente usados na indústria de estruturas de aço também são suportados por determinadas plataformas Verifique com o fabricante se o software deles lê o formato nativo da sua plataforma de design ou requer uma etapa intermediária de exportação.
Sobre Esta Análise
Este guia foi produzido pela equipe de engenharia Zhouxiang, com base em mais de 30 anos de experiência em fabricação de equipamentos de soldagem e implantações em mais de 50 países Os dados de especificação para modelos Zhouxiang refletem os parâmetros de produção atuais As especificações de terceiros (OTC DAIHEN) são provenientes de documentação de produtos publicamente disponível Os dados de mercado são compilados a partir de IFR e empresas independentes de pesquisa da indústria Onde os números exatos não estão disponíveis, os intervalos são fornecidos em vez de valores únicos estimados.
Referências e fontes
- ISO 1018-1:2025 Requisitos de segurança para robôs robóticos industriais Ção Internacional para Normalização
- ISO 1018-2:2025 Requisitos de segurança para aplicações de robôs industriais Ção Internacional para Normalização
- Visualização de dados em tempo real de dados de robôs de soldagem e sistemas digitais duplos (MC)/Institutos Nacionais de Saúde
- Visão geral do produto 7-Axis Robots ÔNDI
- Programação de Robôs Offline para Automação de Soldagem Êxtase
- Mercado de soldagem robótica atingirá US$ 20,78 bilhões até 2032 – Pesquisa
- 5 falhas comuns na soldagem robótica e como evitá-las & Tregaskiss
Artigos Relacionados
- Robô de soldagem cantilever Especificações e modelos completos do produto
- Linha completa de produtos de robô de soldagem (Sistemas de trilhos, pórticos e veículos cantilever)
- Sobre Zhouxiang 30+ Anos de Fabricação de Equipamentos de Soldagem
- Robô de soldagem Zhouxiang Soluções de automação de soldagem industrial
Revisado pela equipe de engenharia de Zhouxiang Última atualização em abril de 2026


