
Póngase en contacto con Zhouxiang

Diseño de diseño de celdas de soldadura robótica: mejores prácticas
Los diseños de celdas de soldadura robóticas mal diseñadas cuestan a los fabricantes de edificios decenas de miles de dólares en retrabajos, pérdida de tiempo de fabricación e incidentes de seguridad que nunca tuvieron que ocurrir. Relativamente pocas decisiones de compra que tome antes de cortar el acero o atornillar un robot al taller marcan la diferencia entre una celda que opera de manera confiable en el tiempo de actividad de 90% y una celda que avanza cojeando en 60%. Esta guía analiza las consideraciones clave (alcance del robot, fijación, simulación de secuencia de soldadura, seguridad y costos de bienes de capital para celdas prediseñadas versus personalizadas) para que pueda hacerlo bien la primera vez.
¿qué implica un diseño de celda de soldadura robótica?
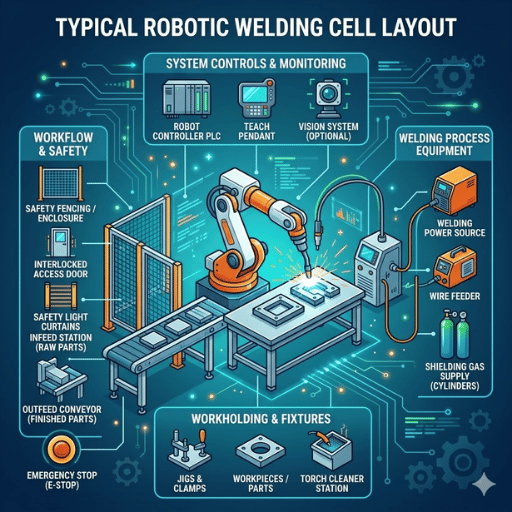
Un diseño de celda de soldadura robótica es la disposición de robots, posicionadores, accesorios, sensores, barreras de seguridad y rutas de movimiento de materiales dentro de un espacio bien definido diseñado para producir soldaduras consistentes en un tiempo de ciclo objetivo para la máquina versus el operador, protegiendo al mismo tiempo a todas las personas. del arco eléctrico, la exposición a los humos y el movimiento de equipos robóticos. Cada decisión sobre la ubicación de los componentes afecta el rendimiento, la capacidad del proceso y los costos operativos.
El diseño adecuado comienza con la planificación del flujo de trabajo. Debe hacer un mapa detallado de la ruta que toma cada componente, desde la entrega de la materia prima hasta la fijación, soldadura, enfriamiento y descarga del paquete. Si diseña una celda de soldadura robótica que requiere que los operadores crucen la envolvente de trabajo de la máquina para cargar piezas, en última instancia verá una lesión en el lugar de trabajo o una producción gravemente paralizada.
La ubicación de los componentes debe seguir el flujo de trabajo. Cada sistema de soldadura robótica necesita que el brazo del robot esté colocado de modo que el alcance del robot cubra todas las uniones soldadas sin reposicionarse. Cada posicionador se encuentra dentro de esa envoltura. Los accesorios se montan en el posicionador. Los sensores, las estaciones de limpieza de boquillas y los cambiadores de herramientas se agrupan en el lado de la celda que no opera, donde permanecen fácilmente accesibles para mantenimiento pero fuera de la ruta del flujo de trabajo.
El espacio del piso está dictado por el flujo de material. Las áreas de carga y descarga deben ser adyacentes cuando sea posible, ya que el operador debe poder dejar caer un conjunto terminado sin caminar más de uno o dos escalones mientras acumula un nuevo conjunto en bruto.
Las zonas de seguridad comprenden el perímetro de un diseño de celda de soldadura robótica. Las cortinas de luz, las cercas físicas, los enclavamientos y las paradas de emergencia definen dónde pueden y dónde no pueden estar las personas durante la operación del robot. Estas zonas deben cumplir con ANSI/RIA R15.06-2012, que rige la integración de sistemas de robots industriales en los Estados Unidos (Estándares de robótica OSHA).
De los más de 1000 proyectos de automatización de soldadura que hemos realizado, las buenas decisiones de diseño tomadas durante la fase de diseño inicial determinan casi 80% del rendimiento a largo plazo de una celda. Mover un posicionador después de verter el concreto y ejecutar el conducto le costará 10 veces más de lo que le costaría en papel.
Componentes clave que necesita cada célula de soldadura

Su celda de soldadura robótica es tan efectiva como su elemento más débil. Cada pieza del equipo de movimiento de material debe dimensionarse, integrarse y seleccionarse para funcionar con todos los demás componentes de la celda. Aquí se explica cómo determinar cómo elegir cada elemento para su preparación para la producción robot soldador celular.
| Componente | Función | Criterios de selección |
|---|---|---|
| Brazo Robótico (6 ejes) | Mueve el soplete de soldadura a través de caminos de soldadura programados | Alcance 650-3000 mm, carga útil desde unos pocos kg hasta más de 1000 kg según la aplicación (por Datos IFR) |
| Antorcha de soldadura | Proporciona arco y metal de relleno a la junta soldada | MIG, TIG o láser; capacidad de rotación de 360°; Clasificación del ciclo de trabajo para el volumen de producción |
| Posicionador | Gira e inclina la pieza de trabajo para soldadura en posición plana | Tocadiscos o cabezal-cola; servoaccionamiento de CA; capacidad de carga útil (p. ej., 1445 libras por lado) |
| Accesorios | Mantenga la geometría de la pieza de trabajo dentro de la tolerancia durante la soldadura | Tolerancia ±0,022® para alambre de 0,045® por Directrices de Lincoln Electric |
| Sensores | Coloque la costura de la pista y compense la variación de la pieza | Seguimiento de costuras láser, detección de arco pasante o detección táctil según el tipo de articulación |
| Estación de limpieza de boquillas | Elimina la acumulación de salpicaduras de la boquilla del soplete entre ciclos | Escariador automático con spray antisalpicaduras; montar dentro del alcance del robot pero lejos de la zona del operador |
| Equipo de seguridad | Protege a los operadores del arco, los humos y el movimiento del robot | Cortinas de luz, cercas físicas, enclavamientos, topes electrónicos según ANSI/RIA R15.06 |
Mientras que el robot industrial es la pieza central, el posicionador a menudo determina si la celda cumplirá el tiempo del ciclo. Ese posicionador servoaccionado permite que el robot de soldadura siga un camino programado en posición plana en cada unión (la orientación más rápida y de mejor calidad) girando la pieza de trabajo en lugar de forzar los brazos de soldadura a través de posiciones verticales y aéreas peligrosas.
Los accesorios merecen más consideración de diseño de lo que les dan la mayoría de los talleres. La fijación para soldadura robótica exige tolerancias más estrictas que la soldadura manual. Como la soldadura robótica está programada para seguir un camino, no puede adaptarse sobre la marcha como lo hace un soldador experto. Las especificaciones publicadas por Lincoln Electric exigen una precisión del dispositivo de aproximadamente la mitad del diámetro del cable.
Siempre dimensione su posicionador para obtener la pieza más pesada y el peso del accesorio. El tamaño insuficiente es el error más común y costoso en la planificación de celdas de soldadura.
Si elige su primera celda de soldadura robótica, estación de trabajo de soldadura de un solo robot con un posicionador integrado y un gabinete de seguridad, maneja la mayoría de las aplicaciones estándar sin la complicación de un diseño multirobot.
Cómo el alcance del robot y el tamaño de las piezas dan forma a su diseño

Los robots industriales de seis ejes producidos para soldadura pueden manejar sobres de alcance desde 650 mm para unidades de mesa más pequeñas hasta más de 3000 mm para conjuntos estructurales grandes (guía de bots estándar). El tamaño de la pieza que se suelda determina qué robot selecciona y esas dimensiones, a su vez, determinan cada dos medidas en el diseño de la celda.
Seleccionar robots sigue una regla: dimensionarlo para la pieza más grande. Instalar un robot pequeño en una pieza grande es una tontería: el robot sólo puede alcanzar algunas de las uniones soldadas sin reposicionar la base. La reposicionamiento añade tiempo de ciclo, anclajes de suelo y complejidad de programación. Instalar un robot grande en piezas pequeñas es francamente una tontería: la mayor inercia puede perjudicar la calidad de la soldadura en materiales de calibre fino, ya que se sobrepasa a altas velocidades.
Diseñe su celda para la parte más pesada. Bernard y Tregaskiss recomiendan dimensionar toda la celda «la carga útil del posicionador, la carga de la abrazadera del dispositivo, la carga útil del robot “para la pieza de trabajo más grande y pesada de la mezcla. Es mucho más fácil soldar una pieza pequeña en un dispositivo de gran tamaño que apretar la pieza pesada en la celda más pequeña. Diseñar una celda de soldadura alrededor de su pieza de trabajo más grande evita costosas modernizaciones cuando la producción pasa a conjuntos más pesados.
En algunas combinaciones, el tamaño y la capacidad de peso son tan importantes como el alcance. Un brazo robótico con sólo 2.000 mm de alcance pero una carga útil de 6 kg no podrá transportar un soplete MIG pesado y su alimentador de alambre. El peso de la antorcha, el revestimiento del cable y todo lo que esté montado en el frente cuentan con la designación de carga útil del robot. Repasar cien gramos o tres y tiene fallas en el servo, desviación de trayectoria y fallas tempranas en las juntas que afectan la consistencia de la soldadura durante toda la producción.
La soldadura en el borde de la envoltura de alcance provoca ángulos de antorcha inconsistentes, mala calidad de la soldadura y desgaste acelerado de los cables. Mantenga siempre las uniones de soldadura críticas dentro de 85% del alcance máximo del robot.
Al planificar el diseño de su celda, dibuje un círculo de alcance 85% en el plano de planta. Cada junta soldada en cada parte de su mezcla debe permanecer dentro de ese círculo. Si sueldas en el borde y una de esas juntas cae fuera de él, elige un robot más grande o agrega un posicionador para acercar la pieza de trabajo.
Secuencia de soldadura y reducción del tiempo de ciclo mediante el diseño
El diseño y la secuenciación de soldadura son inseparables. Cómo el robot suelda cada unión se relaciona con el equilibrio de entrada de calor, la gestión de la distorsión y el tiempo total del ciclo y el diseño físico de la celda, ya sea facilitando o combatiendo la secuencia de soldadura.
Los datos concretos respaldan esto en un diseño probado. Un estudio publicado en ResearchGate encontró ahorros de tiempo de ciclo de 12,7% simplemente reordenando la secuencia de soldadura en una celda de soldadura robótica automotriz: dos soldaduras de robot se redujeron 68 segundos de un ciclo de 532 segundos, llevándolo a 464 segundos. Otro caso descubierto en el libro TOA-SE redujo el tiempo del ciclo de 45% cambiando de un diseño de celda de dos robots a un diseño de seis robots de múltiples estaciones, incluso con mayor rendimiento, la celda terminó más rápido:
Datos de reducción del tiempo del ciclo
- 12.7% ahorró tiempo de ciclo: dos soldaduras de robots pasaron a una nueva secuencia [sin cambios de hardware] (estudio de caso automotriz de ResearchGate)
- Se obtuvo una eficiencia de -68 segundos en las mismas piezas, la misma celda, cuando se rediseñó una celda de seis robots en una línea de estaciones múltiples para mejorar el diseño. (estudio de caso TOA-SE)
- 45% ahorró tiempo de ciclo actualizando al diseño de celda de seis robots para mejorar la ubicación de la estación. (estudio de caso TOA-SE)
Los posicionadores servoaccionados regulan la secuencia de soldadura girando indexadamente la pieza de trabajo mientras el robot realiza la mayoría de las tareas de soldadura. La entrada de calor es más eficiente, se minimiza la distorsión y cada junta se coloca plana donde la deposición puede progresar a un ritmo rápido con menos tasas de defectos. El proceso de soldadura se ejecuta más rápido cuando la gravedad ayuda en lugar de combatir la deposición.
💡 Consejo profesional
Coloque las zonas de carga y descarga de modo que el operador funcione mientras el robot suelda. En una celda de doble estación, el operador carga una pieza en bruto en la estación A mientras el robot suelda la estación B. Cuando el robot termina, el posicionador indexa y el robot inicia la estación A inmediatamente “tiempo de inactividad cero del robot. Este flujo de trabajo paralelo puede duplicar el rendimiento efectivo en comparación con una celda de una sola estación donde el robot permanece inactivo durante cada ciclo de carga.
Uno estación de trabajo de soldadura robótica la incorporación de un posicionador de doble estación permite a los talleres más pequeños esta eficiencia de flujo de trabajo paralelo sin requerir un diseño alimentado por transportador, separado por una pantalla de seguridad:
La clave: la calidad adecuada de la soldadura junto con tiempos de ciclo rápidos no es una compensación. Un diseño diseñado para promover una buena secuencia de soldadura produce ambos, y las ganancias de productividad con cada cambio que la línea puede ejecutar:
Simulación y programación sin conexión antes de construir

El software de programación sin conexión permite a los ingenieros programar el robot en un modelo virtual de la celda antes de instalar cualquier equipo físico. Según Componentes visuales, OLP puede ser hasta 10 veces más rápido que enseñar programación colgante « un caso documentado redujo el tiempo de programación de 13 horas a menos de 3 horas usando programas de software fuera de línea.
Sin embargo, la velocidad no es el principal factor de la simulación. El cálculo de colisiones sí lo es. Una simulación es capaz de detectar interferencias entre el soplete y las abrazaderas del dispositivo e incluso el posicionador antes de que ocurran colisiones físicas. El software de simulación puede confirmar que el robot puede lograr todas las uniones soldadas en la secuencia programada antes de agarrar una pieza real. El software puede validar además que las rotaciones del posicionador no introducen piezas de manera demasiado agresiva en la base del robot ni ponen en peligro demasiados límites de flexión del cable:
Las comprobaciones de accesibilidad durante el diseño inicial evitan los errores más costosos en el diseño del formulario. Cuando la simulación muestra que el robot no puede alcanzar una unión soldada en un ángulo determinado del posicionador, usted se retira a su sistema informático para reprogramar el diseño de la celda, tal vez reubicando la base del robot 200 mm, alterando la altura del posicionador o girando el dispositivo, ninguno de estos costos simula nada y todos cuestan miles en hardware. Tómese el tiempo para simular el diseño de la celda de soldadura en programación fuera de línea antes de comprometerse con compras de hardware.
Las pruebas de interferencia de accesorios se realizan en paralelo con la verificación de accesibilidad. La simulación importará el modelo CAD del dispositivo y verificará que los puntos de sujeción no bloqueen el acceso de soldadura a ninguna junta soldada. Si lo hacen, el diseño del dispositivo se revisa antes de la fabricación. Esta única verificación elimina lo que consideramos la fuente más común de retrasos en las nuevas instalaciones de celdas que se derivan de accesorios que parecen finos en dibujos 2D pero que causan todo tipo de problemas en 3D.
Tómese el tiempo para simular el diseño de la celda de soldadura antes de cortar acero. Una inversión de simulación de $5.000 puede evitar una retrabajo de $50.000.
Una vez que el diseño de la celda se programa y valida en simulación, la construcción física de la celda es mero ensamblaje. Las computadoras de control del robot se envían con programas funcionales, los accesorios llegan calibrados y listos para instalar, y el tiempo de puesta en servicio se reduce de semanas a días.
Celdas de soldadura robóticas prediseñadas versus personalizadas

A cualquier cliente que construya una celda de soldadura robótica se le enfrentan dos opciones: ¿debería comprar un paquete estándar o diseñar un sistema personalizado? Ambas opciones abordan las necesidades legítimas del cliente y ambas pueden generar desperdicio si se eligen incorrectamente.
| Factor | Preingeniería | Personalizado |
|---|---|---|
| Costo | $50.000-$150.000 | $150.000-$250.000+ |
| Plazo de entrega | 4-8 săptămâni | 12-20 săptămâni |
| Flexibilidad | Configuraciones fijas | Totalmente adaptado a piezas y flujos de trabajo |
| Mejor para | Piezas estándar, gran volumen | Piezas complejas, flujos de trabajo únicos |
| Escalabilidad | Limitado | Posible expansión modular |
Las celdas de soldadura Cobot se han convertido en la solución de la industria a este dilema. Para instalaciones de nivel básico, $25,000-$50,000 ofrece una celda de soldadura cobot como alternativa a las cercas de seguridad y las limitaciones de espacio de una celda de robot industrial. Más pequeños y lentos que los robots industriales, los cobots permiten la intercambiabilidad de la automatización robótica en la celda de trabajo con una reprogramación mínima una vez que se establece su proceso inicial.
Los rangos de tamaño de posicionador estándar que coinciden con las dimensiones promedio de una pieza de trabajo, combinados con menos de cinco familias de piezas por trabajo, hacen que una celda prediseñada sea la mejor opción de retorno de la inversión. El sistema de automatización industrial aparece en su muelle de carga probado y calibrado, listo para fabricar piezas en cuestión de días. Piezas de trabajo más grandes y variables, combinadas con necesidades de soldadura específicas y diferentes requisitos de manipulación de materiales, hacen que valga la pena invertir en una celda robótica personalizada.
Las comparaciones de costos respaldan estas opciones: los datos confiables de los socios de la industria informan un retorno de la inversión de 1 a 3 años en la mayoría de los sistemas de soldadura robótica, con ahorros de costos de hasta 50% en aplicaciones de soldadura de gran volumen. La utilización, más que los costos de capital, determina la recuperación general. Una celda personalizada de $150.000 utilizada en dos turnos vale la pena más rápido que una celda prediseñada de $75.000 en un solo turno con una utilización de 60%.
La expansión futura está bien favorecida por un diseño de celda de soldadura que favorece el crecimiento cuando la inversión en planificación deja espacio en al menos un lado de la celda para un segundo robot u otra estación posicionadora. El diseño inteligente de conductos «gas, energía, datos «con capacidad adicional hoy permite actualizar para soldadura de gran volumen en el futuro sin una demolición y reconstrucción completa de la planta.
Si su tienda está a punto de poner en marcha su primer proyecto de soldadura robótica, explore células de soldadura preconfiguradas construidas para la producción gneste incluye las aplicaciones robóticas más comunes para estructuras de acero, trabajos de placas y fabricación en general, con diseños probados listos para enviar a soldadura. Diseñar una celda con robótica prevalidada y paquetes consumibles ahorra meses de trabajo de diseño inicial.
Zonas de seguridad y cumplimiento en el diseño de células soldadas

ANSI/RIA R15.06-2012 es el estándar a cumplir para la seguridad de los robots industriales en los Estados Unidos. Esto cubre tanto la fabricación como la implementación de sistemas robóticos y es el mismo estándar que OSHA recurre a la inspección de instalaciones robóticas. OSHA no tiene una regulación de caja de herramientas específica para robótica, pero los inspectores y empleadores de OSHA confían en ANSI/RIA R15.06 y la cláusula de deber general para determinar si el diseño de una celda de soldadura robótica es seguro (tienda web ANSI).
Necesita una evaluación de riesgos documentada antes de solicitar una sola pieza de equipo de seguridad para cualquier celda de soldadura robótica. Esto debe identificar los peligros (destello de arco, gases de escape, puntos de pellizco, salpicaduras flotantes, movimiento del robot) y asignar controles a estos peligros. Sin una evaluación de riesgos, su impulso para lograr los entregables del proyecto corre el riesgo de omisiones de diseño que socavarán la seguridad de la instalación completa. ANSI/RIA R15.06 Parte 2 exige esto para cada instalación de robot nueva o modificada, independientemente del tipo de aplicación robótica o volumen de producción.
Estas mejores prácticas son los controles de seguridad que revisará con nosotros antes de iniciar sesión en el diseño de una celda:
- ✔
Realizar una evaluación de riesgos según ANSI/RIA R15.06 Parte 2, documentada y firmada por un integrador calificado - ✔
Salvaguardias físicas (cercas perimetrales, cortinas de luz en aberturas de carga/descarga, enclavamientos de puertas con cierre eléctrico - ✔
Colocación de paradas de emergencia al alcance de todos los puestos de operador y todos los puntos de acceso de mantenimiento - ✔
Extracción de humos de soldadura que cumple con los requisitos de AWS Z49.1 ñesa el escape local en el arco, no solo la ventilación general del taller - ✔
Disposiciones sobre EPI (cascos de soldadura con oscurecimiento automático para trabajadores cercanos y cortinas de destello para proteger las estaciones de trabajo adyacentes) - ✔
Protección antisalpicaduras para sensores, cables y cualquier junta de robot expuesta. La acumulación de salpicaduras provoca la deriva del sensor y un desgaste acelerado de los cables - ✔
Programa de inspección regular para puntas de contacto consumibles, escariadores de estaciones de limpieza de boquillas y difusores de gas - ✔
Procedimientos de bloqueo/etiquetado publicados en cada puerta de acceso para la entrada de mantenimiento en el sobre de trabajo del robot
Las células MIG y de soldadura por puntos generan los mayores volúmenes de salpicaduras de cualquier tipo de proceso de soldadura, y esas salpicaduras caen en todo el interior del recinto. Los accesorios de soldadura, las lentes de los sensores, los haces de cables y la superficie del posicionador necesitan protección. El compuesto antisalpicaduras en las superficies de los accesorios y los ciclos regulares de limpieza de las boquillas evitan la acumulación gradual que degrada la calidad de la soldadura durante semanas de producción.
Las buenas prácticas de seguridad no son un centro de costos, sino una prima de productividad. El uso de una celda de soldadura robótica que minimiza las dudas y la restricción del operador pasa más horas por turno que un diseño que pone nerviosos a los trabajadores por la zona de carga. Evitar incidentes y tener un flujo de piezas bien organizado y secuenciación de soldadura minimiza el tiempo de inactividad y prolonga la vida útil de todo el sistema.
Preguntas frecuentes

P: ¿Cómo reduce el diseño de las celdas de soldadura el tiempo de producción?
Ver respuesta
Los diseños de celdas de soldadura bien planificados minimizan el tiempo de inactividad del robot al colocar estaciones de carga y descarga donde los operadores pueden trabajar en paralelo al ciclo de soldadura, el orden correcto de las piezas y la secuenciación de la soldadura reducen el movimiento improductivo. Los estudios han demostrado reducciones de más de 12% en los tiempos de ciclo en diseños bien planificados.
P: Celda de soldadura robótica prediseñada o personalizada, ¿cuál es la adecuada para mi tienda?
Ver respuesta
Las celdas prediseñadas ($50K-$150K) pueden ser efectivas para tiendas que producen piezas estándar en volumen medio a alto, con plazos de entrega de 4 a 8 semanas. Las celdas personalizadas ($150K-$250K+) son más apropiadas para tiendas con piezas grandes y pesadas, requisitos excepcionales de flujo de materiales o que planean crecer. Considere sus familias de piezas, objetivos de rendimiento y disponibilidad de espacio antes de tomar cualquier decisión.
P: ¿Se puede ampliar una celda de soldadura robótica después de la instalación?
Ver respuesta
Sí, siempre y cuando diseñes para el crecimiento. Las celdas modulares con espacio abierto en uno o ambos lados, energía y datos universales y capacidad de peso de reserva (posicionadores) admitirán robots o estaciones adicionales. Invertir en un diseño flexible de ubicación desde el principio es 10 veces más barato que agregarlo años después.
P: ¿Qué normas de seguridad se aplican a las células de soldadura robótica?
Ver respuesta
El principal estándar de robots industriales en EE. UU. es ANSI/RIA R15.06-2012, que cubre tanto el diseño del robot como la integración del sistema. OSHA no tiene un estándar específico para robótica, pero aplica la cláusula de deber general y hace referencia a ANSI/RIA R15.06. AWS Z49.1 aborda los requisitos de seguridad, ventilación y extracción de humos en soldadura.
P: ¿Cuánto cuesta una celda de soldadura robótica?
Ver respuesta
Las configuraciones de cobot de nivel básico comienzan en $25,000-$50,000. Las celdas prediseñadas, con un solo robot, posicionador y gabinete de seguridad, son de $50,000 a $150,000. Las celdas totalmente personalizadas, con múltiples robots, sensores inteligentes e integración de manejo de materiales, son $250,000 y más. La mayoría de las máquinas cuestan entre 1 y 3 años para volverse rentables mediante ahorros de mano de obra y aumentos de rendimiento.
P: ¿El robot necesita alcanzar todas las uniones soldadas en una sola configuración?
Ver respuesta
No necesariamente. Un posicionador gira automáticamente la pieza de trabajo para presentar diferentes uniones soldadas en diferentes posiciones, y las celdas de múltiples estaciones pueden tratar la soldadura del robot en una parte mientras el operador carga la siguiente. Pero su diseño solo puede alcanzar todas las uniones en la envolvente de alcance requerida si no reposiciona la base, lo que aumenta el tiempo y la complejidad del ciclo.
Solicite una consulta sobre diseño de celda personalizada →
Acerca de esta guía de diseño
Esta guía se deriva de los 30 años de Zhouxiang en el diseño e instalación de talleres en los campos de estructuras de acero, construcción naval y equipos pesados. Si bien los consejos de diseño particulares variarán según la geometría y el volumen de su pieza de trabajo, hemos visto patrones similares en más de 1000 proyectos de automatización de soldadura completados. Recomendamos utilizar su propia evaluación de riesgos y un integrador calificado para todas las decisiones relacionadas con la seguridad y el cumplimiento.
Referencias y fuentes
- Estándares de robótica OSHA « Departamento de Trabajo de Estados Unidos
- ANSI/RIA R15.06-2012 « Instituto Nacional Americano de Estándares
- Informe IFR World Robotics 2025 « Federación Internacional de Robótica
- Fijación para soldadura robótica « Lincoln Electric
- Cómo OLP mejora la eficiencia de la soldadura robótica « Componente vizuale
- Optimización del tiempo de ciclo en células de soldadura robótica « ResearchGate
- Sobre de Trabajo para Robots Industriales « Bots standard


