
Póngase en contacto con Zhouxiang
Normas de seguridad para robots de soldadura: ISO 10218, evaluación de riesgos y lo que todo fabricante necesita saber
Los estándares de seguridad de robots de soldadura son un conjunto de regulaciones nacionales e internacionales con respecto al diseño, integración de sistemas y aplicación operativa de sistemas de robots industriales diseñados con fines de soldadura. Los estándares internacionales/nacionales incluyen ISO 10218, ANSI/A3 R15.06 y AWS D16.1. La razón por la que existen estos estándares es que las células de soldadura que incorporan robots industriales se utilizan cada vez más junto con maquinaria de alta velocidad y arco deslumbrante, ráfagas de radiación ultravioleta, chispas, descargas eléctricas y humos potencialmente mortales, una confluencia de factores que ya ha provocado decenas de muertes en el lugar de trabajo y cientos de lesiones graves en toda América del Norte. Este manual resume las normas de seguridad pertinentes, explica cómo realizar un análisis de riesgos y describe las medidas de seguridad necesarias para su robot soldador cell, y destaca lo que la industria está equivocándose.
Por qué existen estándares de seguridad para robots de soldadura y por qué no son opcionales

Todas las células robóticas de soldadura que fabricamos en Zhouxiang se envían con un informe de validación y análisis de riesgos. Hacemos esto por nuestra propia voluntad y para cumplir con los estándares internacionales/nacionales, para salvaguardar a nuestros empleados y clientes. Las estadísticas concretas sobre accidentes no mitigados en sistemas de robots de soldadura son sorprendentes:
A Estudio NIOSH publicado en el American Journal of Industrial Medicine (2023) se identificaron 41 muertes por robótica interna entre 1992 y 2017. De ellas, 83% involucraron robots estacionarios «del tipo utilizado en soldadura « y 78% involucraron la herramienta robótica que golpeó a un trabajador durante el funcionamiento regular. Un separado Análisis de 2024 de los informes de lesiones graves de OSHA se encontraron 77 accidentes relacionados con robots entre 2015 y 2022, y los incidentes con robots estacionarios resultaron principalmente en amputaciones de dedos y fracturas en la cabeza y el torso.
41
muertes relacionadas con robots (1992-2017, NIOSH)
$165,514
sanción máxima de OSHA por infracción intencional (2025)
$125,058
compensación laboral promedio por reclamo de amputación
No existe ninguna norma de seguridad de la Administración de Salud y Seguridad Ocupacional (OSHA) específicamente para la robótica en el lugar de trabajo. En cambio, la agencia hace cumplir la seguridad de la soldadura y la seguridad de los robots a través de los estándares generales existentes de la industria: Machine Guarding (29 CFR 1910.212), Lockout/Tagout (29 CFR 1910.147) y la histórica Cláusula de Deber General, Sección 5(a)(1). Si OSHA cree que existe un peligro reconocido y usted no ha realizado una evaluación de riesgos al respecto, puede perseguir una infracción intencional que conlleva hasta $165,514 por instancia. En el caso de Ajin USA, la muerte de un robot en un proveedor de Hyundai resultó en 48 infracciones intencionales y más de $2,5 millones en sanciones combinadas.
⚠¦ Importante
El bloqueo/etiquetado (1910.147) es consistentemente una de las 10 principales violaciones de OSHA. En 2022-2023, OSHA emitió 2.532 citaciones LOTO en 1.368 inspecciones solo en la fabricación (por un total de $20,7 millones en sanciones). La mayoría de las muertes relacionadas con robots ocurren durante las operaciones de mantenimiento.
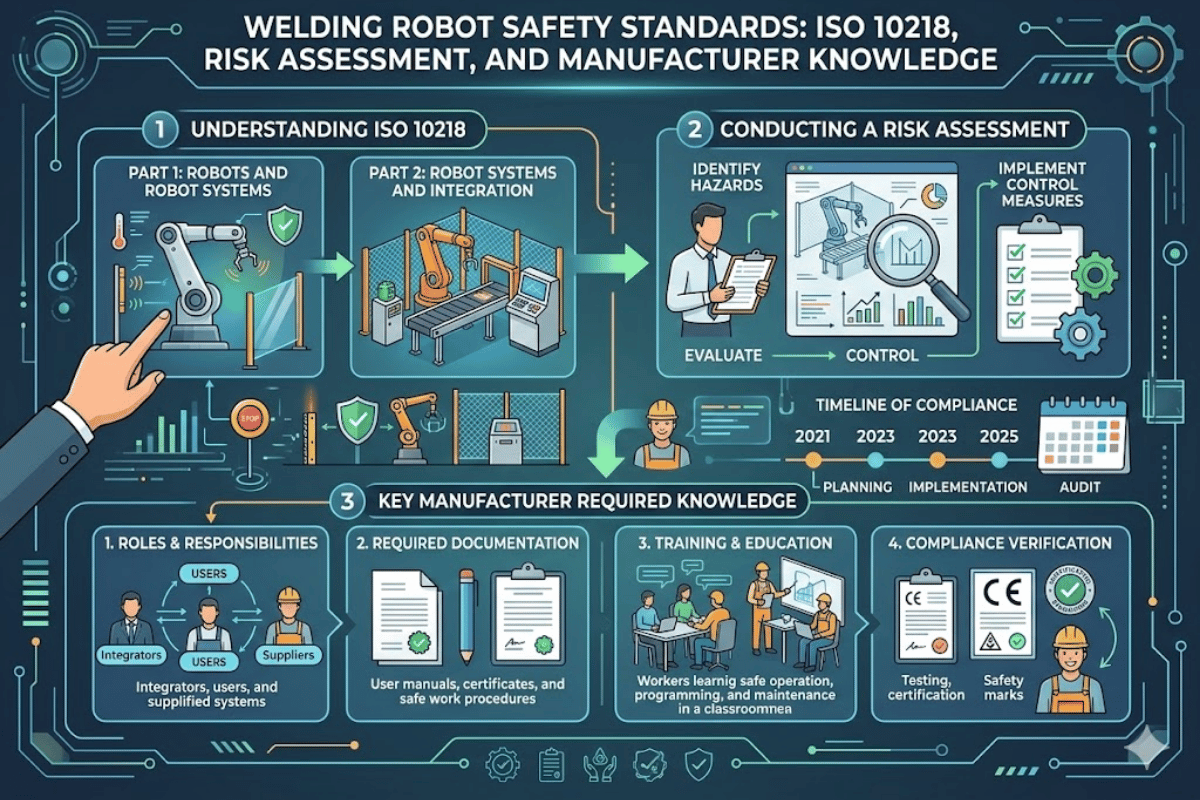
ISO 10218: El marco de seguridad global para robots de soldadura

ISO 10218 es una norma de seguridad internacional de dos partes que establece requisitos de seguridad para robots industriales y sistemas robóticos. La parte 1 define los requisitos de seguridad para el diseño y fabricación del robot; La parte 2 cubre la integración y aplicación del sistema. Ambas partes recibieron revisiones importantes en febrero de 2025: la primera actualización importante de seguridad de robots industriales en 14 años y la más revolucionaria en más de una década.
| Aspecto | ISO 10218-1:2025 (Diseño Robot) | ISO 10218-2:2025 (Integración de sistemas) |
|---|---|---|
| Alcance | Requisitos de seguridad para el diseño y fabricación de robots | Requisitos de seguridad para la integración de robots en células y aplicaciones |
| ¿quién debe cumplir | Fabricantes de robots (FANUC, ABB, KUKA, Yaskawa, etc.) | Integradores de sistemas, usuarios finales y fabricantes de equipos originales que construyen células robóticas |
| Recuento de páginas | 95 páginas (frente a 50 en 2011) | 223 páginas (frente a 72 en 2011) |
| Cambios clave de 2025 | Clasificación de robots Clase I/II; requisitos de ciberseguridad; Niveles de desempeño por función | Contenido de cobot ISO/TS 15066 integrado; espacios dinámicos protegidos; evaluación de riesgos ampliada |
| Seguridad funcional | Reemplaza la manta PL d / Cat 3 con niveles de rendimiento explícitos por función | Límites de contacto de PFL con umbrales de fuerza cuasiestáticos y transitorios |
En el contexto nacional norteamericano, ANSI/A3 R15.06-2025 «acreditado por el Instituto Nacional Americano de Normas « combina ambas piezas ISO 10218. Publicado por la Association for Advancing Automation (A3, anteriormente Robotic Industries Association), ha pasado de 162 páginas a 403 páginas y ahora constituye una tercera parte dedicada a las responsabilidades del usuario. A pesar de que las normas son totalmente voluntarias, OSHA reconoce ANSI/A3 R15.06 como las normas de seguridad aplicables; un tribunal o un investigador generalmente considera esta norma como el mínimo esencial. Cuando aplicaciones específicas de soldadura robótica exigen requisitos diferentes o más estrictos, los sistemas robóticos deben cumplir con estándares específicos de la aplicación que fortalecen la seguridad más allá del marco general.
Para robótica específica de soldadura, AWS D16.1M/D16.1:2018, la especificación para soldadura por arco robótica proporciona requisitos de seguridad adicionales para sistemas de robots de soldadura y equipos auxiliares que cubren los procesos GMAW y FCAW, incluidas evaluaciones de riesgos obligatorias en sistemas de robots de soldadura por arco, verificación de programas (en seco sin arco) y observación de personal capacitado. durante operaciones de soldadura en vivo.
Evaluación de riesgos para células robóticas de soldadura

Una evaluación de riesgos es la base de cada celda de robot de soldadura compatible. Tanto ISO 10218-2 como ANSI/A3 R15.06 requieren que el integrador realice una evaluación de riesgos documentada antes de que la celda entre en producción. Omita este paso y cualquier otra medida de seguridad que instale carece de una justificación documentada.
A continuación se sigue la metodología de evaluación de riesgos ISO 12100:2010 « el estándar fundamental de seguridad de maquinaria tipo A, que define un proceso de tres pasos: determinar los límites de la maquinaria (uso previsto, mal uso previsible, todas las fases del ciclo de vida), identificar sistemáticamente todos los peligros y estimar y evaluar el riesgo para cada uno. RIA TR R15.306-2016, un estándar complementario, añade un enfoque basado en tareas específicamente para células robóticas: desglosar cada actividad humana alrededor del robot “programación, enseñanza, mantenimiento, carga, resolución de problemas, limpieza « y evaluar los peligros para cada tarea individualmente.
En nuestro piso de producción en Zhouxiang, aprendimos temprano que las mayores fallas en la evaluación de riesgos provienen de tratar al robot como una única fuente de peligro en lugar de mapear cada tarea que un humano realiza cerca de él. Un operador colgante de enseñanza durante la operación del robot a velocidad reducida enfrenta peligros diferentes a los de un técnico de mantenimiento que limpia un atasco con los guardias abiertos. Ambos escenarios requieren medidas y documentación de seguridad distintas.
Categorías de peligro de las células de robots de soldadura
- Peligros mecánicos «puntos de aplastamiento y pellizco entre el brazo del robot y los accesorios, impacto por movimientos inesperados, peligros de atrapamiento, salpicaduras voladoras
- Peligros eléctricos: exposición a corriente de soldadura, campos electromagnéticos, energía almacenada en condensadores y sistemas neumáticos, descargas eléctricas de conductores expuestos
- Peligros térmicos “quemaduras por radiación de arco, superficies calientes en antorchas y piezas de trabajo, contacto de metal fundido
- Radiación del arco de soldadura ^ Exposición a los rayos UV que causa flash del soldador (fotoqueratitis); Aproximadamente la mitad de las lesiones oculares por arco ocurren en compañeros de trabajo que no están soldando
- Inhalación de humos « humos de soldadura que contienen manganeso, cromo hexavalente (Cr VI), óxido de zinc y otros compuestos tóxicos
- Ruido « ruido del proceso de arco, movimiento de robots y equipos periféricos
Jerarquía de Reducción de Riesgos (ISO 12100)
- Diseño inherentemente seguro « Elimine o reduzca el peligro en su origen (aumente las holguras, reduzca la velocidad del robot, seleccione procesos de soldadura con menos humos)
- Controles de salvaguardia e ingeniería «Barreras físicas, portones entrelazados, cortinas de luz, sistemas de extracción de humos
- Información de uso « Entrenamiento, señales de advertencia, EPI « el nivel menos efectivo, nunca un sustituto de los controles de ingeniería
En comparación con la soldadura manual, la soldadura robótica especifica requisitos para espacios protegidos, monitoreo de velocidad del robot e integridad de enclavamiento que van más allá de las operaciones manuales. ISO 10218-2 proporciona requisitos para cada fase del ciclo de vida de la celda, desde el diseño inicial hasta el desmantelamiento.
Salvaguardias para soldar células robóticas « físicas y electrónicas

Una vez que la evaluación de riesgos controla los peligros que no puede eliminar, el siguiente paso es implementar salvaguardias para la celda del robot de soldadura. Una célula robótica de soldadura eficiente incorpora un sistema de defensa en capas: barreras físicas para protección primaria, salvaguardias electrónicas como sistema secundario y sistemas de parada de emergencia como línea de defensa final.
| Tipo de salvaguardia | Aplicación | Referencia estándar |
|---|---|---|
| Cercado perimetral (guardias fijas) | Recinto primario alrededor del área de trabajo del robot; altura mínima de 1.400 mm | ISO 14120, ISO 13857 |
| Puertas de acceso entrelazadas | Puntos de entrada con enclavamientos electromecánicos, codificados por RFID o con llave atrapada | ISO 14119:2024 |
| Cortinas de luz (Tipo 4 ESPE) | Detección optoelectrónica activa en aberturas de carga/descarga; clasificado hasta PLe/SIL3 | IEC 61496 |
| Escáneres láser de seguridad | Detección basada en zonas con zonas de advertencia y protección configurables (rango de hasta 5,5 m) | IEC 61496-3 |
| Alfombrillas de seguridad (sensibles a la presión) | Detección secundaria a nivel de suelo dentro del área perimetral vigilada | ISO 13856-1 |
| Botones de parada de emergencia | Actuador rojo sobre fondo amarillo; debe cerrarse hasta restablecerlo manualmente; al alcance en todo momento | ISO 13850:2015 |
Calcular la distancia mínima de seguridad para cortinas ligeras requiere la fórmula de la norma ISO 13855: S = (K×T) + C, donde K es la velocidad de aproximación (2000 mm/s para aproximación mano/brazo), T es el tiempo total de respuesta del sistema (cortina de luz + monitor + parada de máquina) y C es una distancia suplementaria basada en la resolución de detección. Para la mayoría de las células de robots de soldadura, este cálculo produce una distancia mínima de montaje de 400-800 mm desde la zona de peligro.
⚠¦ Importante
Una parada de emergencia [solo] nunca es adecuada como única medida de seguridad para una celda de robot de soldadura. ISO 13850 requiere que se empleen topes electrónicos como complemento de otros sistemas de protección y no como sustituto. Las medidas de seguridad deben incluir protección primaria (cercas, cortinas de luz, escáneres de área) para evitar el acceso a la zona de peligro en primer lugar.
La arquitectura de seguridad basada en zonas es la mejor práctica de seguridad actual para células de soldadura robótica. Las barreras físicas con puertas entrelazadas forman la zona exterior. Una zona de advertencia monitoreada por escáneres láser activa alarmas audibles y visuales cuando se acerca el personal. Una zona de protección activa una parada monitorizada con clasificación de seguridad (ahora llamada “parada controlada” en ISO 10218:2025) si alguien traspasa el límite. El acceso a la zona interior “dentro de la celda “requiere puertas cerradas con procedimientos completos de bloqueo/etiquetado.
Seguridad colaborativa de robots en aplicaciones de soldadura
Los robots colaborativos están experimentando una evolución vertiginosa en la soldadura, pero el lenguaje técnico también está cambiando. ISO 10218:2025 ahora se refiere a “aplicaciones colaborativas” en lugar de “robots colaborativos”. ¿Por qué? Si un robot se clasifica como colaborativo depende del caso de uso, no del componente de la herramienta. Si el componente de herramienta de la soldadura tiene una fuerza limitada, pero es el proceso el que no es -gon, entonces no es una situación colaborativa.
ISO/TS 15066 -ñonate evoluciona para clasificar y educar en el contexto de ISO 10218-2:2025 -ñonate que cuatro modos de funcionamiento constituyen situaciones colaborativas:
- Parada monitoreada con clasificación de seguridad; El robot no se mueve hasta que el humano entra o hasta que pasa más allá de la zona de peligro; funciona completamente cuando no hay ningún humano presente.
- Guía manual; El robot es movido directamente por el usuario que lo controla a través de un dispositivo portátil ubicado cerca del efector final. (enseñanza de ruta)
- Monitoreo de velocidad y separación; El robot y el usuario comparten el mismo espacio de trabajo mientras los sensores mantienen una distancia segura en todo momento.
- Limitación de potencia y fuerza (PFL); Se espera contacto; La carga útil, la velocidad y la inercia están restringidas, por lo que las fuerzas se mantienen por debajo de los umbrales biomecánicos de aparición del dolor, normalmente 250 mm/s o menos
La Universidad de Mainz llevó a cabo una investigación sobre los límites biomecánicos para todo el cuerpo y concluyó que no se permite ningún contacto con la cara, el cráneo o la frente en ningún modo de aplicación colaborativa. El Anexo A de ISO/TS 15066 enumera las fuerzas máximas para 12 regiones y 29 ubicaciones en el cuerpo. Los umbrales cuasiestáticos (de sujeción) son 40-65% de valores transitorios (de impacto) porque la compresión sostenida causa daño tisular con fuerzas más bajas.
💡 Marco de decisión: ¿Su Cobot de soldadura ¿necesitas cercas?
Incluso si el brazo del robot colaborativo tiene clasificación PFL, todavía existen riesgos de soldadura por arco que no se pueden abordar completamente mediante limitación. Por ejemplo, en la práctica la gran mayoría de los robots soldadores de células cobot seguirán estando equipados con una valla perimetral de tres lados que encierra cortinas antideslumbrantes de arco y el acceso se realiza a través de un único lado de carga abierto protegido con cortinas de luz o escáneres de área. Las cercas suelen ser sólo una pequeña fracción (alrededor del 20 por ciento) del coste total de una celda de trabajo de soldadura.
Formación de operadores, EPI y cultura de seguridad

Los controles y salvaguardias de ingeniería comprenden los dos primeros niveles de la jerarquía de mitigación de riesgos en los sistemas de soldadura robótica. La formación, los EPI y los controles administrativos (el tercer nivel de la jerarquía) abordan las lagunas que el hardware no puede cubrir.
OSHA 29 CFR 1910.252 Especifica una protección ocular adecuada para el soldador y el ayudante. Para GMAW, un proceso común en la soldadura robótica, los cascos de soldadura con oscurecimiento automático deben tener una clasificación de sombra de 10 a 13 según el amperaje (sombra 11 de 60 a 160 amperios, 12 de 160 a 250 amperios, 14 de 250 a 500 amperios, según ANSI/AWS). Incluso los operadores que controlan una soldadura robótica a través de ventanas de observación necesitan protección con clasificación de sombra « el arco no distingue entre un soldador manual y un espectador. Más allá de soldar cascos, las gafas de seguridad con protectores laterales deben usarse lejos del arco para protegerse contra partículas voladoras y rayos UV reflejados en el entorno de soldadura.
La captura de humos y el escape son igualmente importantes. OSHA especifica la ventilación mecánica siempre que el interior del espacio de trabajo sea inferior a 10.000 pies cúbicos por soldador o la altura del techo sea inferior a 16 pies y al menos 2.000 CFM por soldador. ACGIH fija el valor límite para los humos de soldadura generales en 5 mg/m³ (TWA de 8 horas), pero los componentes individuales tienen límites mucho más bajos: manganeso a 0,02 mg/m³ y cromo hexavalente a 0,01 mg/m³. La ventilación adecuada no se puede sustituir únicamente mediante EPP para soldar aleaciones inoxidables y con alto contenido de manganeso.
Lista de verificación de capacitación para operadores de robots de soldadura
- ✔
Bloqueo/etiquetado (29 CFR 1910.147): empleados autorizados o afectados - ✔
Enseñe el funcionamiento del colgante a velocidad reducida con el interruptor de habilitación - ✔
Ubicación y activación de paradas de emergencia para cada estación - ✔
Selección e inspección de EPI « verificación de la sombra del casco, protección respiratoria, ropa resistente al fuego - ✔
Reconocimiento de peligros de soldadura por arco “Exposición a rayos UV, riesgos de humos, quemaduras por salpicaduras - ✔
Validación del programa de funcionamiento en seco (según AWS D16.1), antes de la soldadura en vivo - ✔
Procedimientos de denuncia de cuasi accidentes y participación en la cultura de seguridad
Durante nuestra capacitación en Zhouxiang, requerimos que cada nuevo operador de cobot de soldadura pase la lista de verificación de validación del programa anterior antes de operar una celda de forma independiente. También se requiere volver a capacitarse ante cualquier cambio en el diseño de la celda, el software del controlador o el proceso de soldadura. OSHA exige que el empleador documente los requisitos de capacitación, algo que muchas instalaciones no hacen hasta justo antes de una inspección de cumplimiento.
Crear una cultura de seguridad va más allá de la formación individual: significa una aplicación coherente de las prácticas de seguridad, informes de seguridad y salud y atención a la seguridad en todos los niveles para todo el personal que entra en la celda de soldadura robótica.
Errores comunes en materia de cumplimiento de la seguridad y cómo evitarlos

Un área de inconformidad persistente que observamos durante las auditorías de integración es asumir que la compra de un robot con clasificación CE automáticamente hace que la celda cumpla con las normas. Este no es el caso. Las pruebas del fabricante del robot cubren el propio robot «ISO 10218-1. Consideraciones de seguridad a nivel de celda 'análisis de peligros, documentación de validación, salvaguardia', caída para el usuario final y el integrador del sistema (ISO 10218-2).
| Error | Consecuencia | Arreglar |
|---|---|---|
| Evaluación de riesgos incompleta “evaluando al robot” en lugar de cada tarea humana | Se pasan por alto los riesgos que implica el mantenimiento de la celda, la eliminación de atascos y la enseñanza: estas fases representan la mayoría de las lesiones | Utilice una metodología basada en tareas (RIA TR R15.306); documentar cada interacción humana con la célula |
| Abuso de modo de mantenimiento y salvaguardias omitidos | Los operadores anulan los enclavamientos para eliminar los atascos más rápido; El modo de mantenimiento se dejó activo durante la producción | Instalar enclavamientos codificados por RFID (ISO 14119:2024); Diseñe rutinas de mantenimiento que no requieran anulación general del enclavamiento |
| Modificaciones de celdas no documentadas | Una nueva pinza, actualización de software o cambio de área de trabajo invalida la calificación de seguridad original y la evaluación de riesgos | Registre cada modificación en un CMMS; desencadenar una reevaluación del riesgo para cada cambio |
| Verificación sin validación | Los documentos parecen correctos en papel, pero las medidas de seguridad instaladas nunca se prueban funcionalmente | Después de la instalación, valide todas las funciones de seguridad mediante pruebas analíticas y funcionales: confirme que el robot se detenga antes de llegar a la zona de peligro |
| No hay cronograma de auditoría de seguridad posterior a la instalación | Los protocolos de seguridad se degradan con el tiempo; Las listas de verificación manuales almacenadas en carpetas crean lagunas en la auditoría | Digitalizar las inspecciones de seguridad; programar reevaluaciones periódicas que cubran desgaste, roturas y cambios indocumentados |
En esencia, la mayoría de estos errores provienen de tratar la seguridad como una instalación única en lugar de un programa continuo. ANSI/A3 R15.06-2025 ahora incluye responsabilidades explícitas del usuario en la Parte 3, reconociendo que el papel del usuario final no termina en la puesta en servicio. Las instalaciones con sistemas robóticos digitalizados de inspección de seguridad lo son 3,2 veces más probabilidades de aprobar las auditorías OSHA e ISO 10218 sin hallazgos, en gran parte porque el seguimiento automatizado detecta modificaciones no documentadas que los procesos manuales pasan por alto.
Los programas de seguridad sólidos siguen principios de seguridad claros: cada modificación de un robot de soldadura industrial desencadena una reevaluación de los parámetros de seguridad, se documentan posibles brechas de seguridad y se verifica el uso de sistemas robóticos de inspección de seguridad según los requisitos aplicables.
Preguntas frecuentes

P: ¿Cuál es el estándar de soldadura robótica?
Ver respuesta
ISO 10218-1 e ISO 10218-2 (revisado en 2025) abordan la integración del sistema y el hardware del robot. ANSI/A3 R15.06-2025 sirve como adopción nacional en EE. UU. AWS D16.1M/D16.1:2018 agrega reglas específicas para los procesos GMAW y FCAW.
P: ¿Qué es ISO 10218 y cómo se aplica a los robots de soldadura?
Ver respuesta
ISO 10218 es una norma internacional de dos documentos para la seguridad de los robots industriales. La Parte 1 (requisitos de diseño y fabricación de robots) es relevante para los fabricantes de robots; La parte 2 (integración de sistemas de robots, protección y seguridad a nivel de aplicación) se aplica a los integradores de sistemas y usuarios finales. El estándar es neutral en cuanto a aplicaciones y se aplica a todos, incluida la soldadura.
La versión 2025 incorpora seguridad de aplicaciones colaborativas, las demandas de ciberseguridad de dispositivos inteligentes y espacios dinámicos protegidos.
P: ¿Cuáles son los requisitos de seguridad para las máquinas de soldar?
Ver respuesta
Los requisitos de seguridad de las máquinas de soldar están cubiertos por varias normas combinadas. OSHA 29 CFR 1910.252 cubre los requisitos básicos del empleador en materia de EPI, ventilación y seguridad contra incendios para todas las operaciones de soldadura. NFPA 51B especifica los requisitos de seguridad contra incendios para soldadura y corte.
AWS Z49.1 legisla la soldadura, el corte y otras medidas de seguridad en trabajos en caliente. Combinadas, estas normas requieren: Una ventilación mecánica portátil capaz de proporcionar al menos 2000 CFM de aire fresco para cada soldador en el espacio confinado, una clasificación de pantalla de lente de filtro aprobada para amperaje y proceso, una vigilancia contra incendios cuando se encuentre a 35 pies del área de trabajo en caliente, varias precauciones de seguridad eléctrica para evitar descargas eléctricas y un tren de preparación documentado para cada operador antes de su asignación al trabajo en caliente.
P: ¿Qué es ANSI/RIA R15.08?
Ver respuesta
ANSI/RIA R15.08 es el estándar de seguridad estadounidense utilizado para clasificar los robots móviles industriales (IMR). Dichos robots son robots móviles autónomos implementados en entornos industriales. El estándar considera 3 tipos de IMR, los propios IMR (Parte 1-2020), la integración del sistema (Parte 2-2023) y las responsabilidades del usuario (Parte 3-futuro).
Los IMR deben clasificarse en 3 tipos: A (IMR independiente), B (IMR con cargas útiles pasivas/activas) y C (IMR con brazos manipuladores, en el caso de que la plataforma móvil lleve un robot de soldadura).
P: ¿Los robots de soldadura colaborativos necesitan cercas de seguridad?
Ver respuesta
En gran medida, sí. Aunque el brazo robótico colaborativo tiene la capacidad de cumplir con el requisito de limitación de potencia y fuerza, los peligros inherentes al proceso de soldadura por arco, que incluyen: radiación ultravioleta, arco eléctrico, vapores de soldadura tóxicos, salpicaduras fundidas y fuentes de calor radiante, no se pueden controlar mediante tecnología PFL. La mayoría de las células de cobot de soldadura robótica utilizan cercas perimetrales en tres lados con cortinas de arco antideslumbrante y un único lado de carga abierto protegido por cortinas luminosas o escáneres de área.
La protección específica de cada aplicación se regirá por una evaluación de riesgos.
P: ¿Cuáles son los mayores riesgos para la seguridad en la soldadura robótica?
Ver respuesta
Los principales 6 riesgos de seguridad al trabajar con soldadura robótica incluyen: 1) arco eléctrico y radiación ultravioleta que quema ojos y piel 2) lesiones por aplastamiento e impacto del brazo del robot mientras se mueve inesperadamente 3) descarga eléctrica del equipo de soldadura y/o conductores enfundados o expuestos 4) inhalación de humos de soldadura que contienen manganeso, cromo hexavalente y otros carcinógenos 5) lesiones en puntos de pellizco con piezas móviles del robot que quedan atrapadas en las piezas fijas 6) quemaduras por metal fundido y superficies calientes.
¿necesita una celda de robot de soldadura construida según los estándares?
Zhouxiang diseña y fabrica sistemas de robots de soldadura con evaluaciones de riesgos documentadas, salvaguardias validadas y documentación de cumplimiento completa incluida. Explora nuestro soluciones de robots de soldadura o solicitar una consulta.
Referencias y fuentes
- Muertes laborales relacionadas con robots en los Estados Unidos, 1992-2017 « NIOSH / Revista Americana de Medicina Industrial (2023)
- Lesiones relacionadas con robots en el lugar de trabajo: un análisis de los informes de lesiones graves de OSHA « Ergonomía Aplicada (2024)
- Estándares de robótica OSHA « Departamento de Trabajo de Estados Unidos
- Sanciones de OSHA « Departamento de Trabajo de Estados Unidos
- Norma de seguridad de robots ANSI/A3 R15.06-2025 « Blog ANSI
- AWS D16.1M/D16.1:2018 Seguridad de soldadura por arco robótico « Blog ANSI
- ISO 12100:2010 Seguridad de las Maquinaria “Evaluación de Riesgos « Organizare internațională pentru standardizare
- 29 CFR 1910.252 Requisitos Generales (Soldadura, Corte, Soldadura) « Departamento de Trabajo de Estados Unidos
- ISO/TS 15066 explicado «Asociación para el Avance de la Automatización (A3)
- Inspecciones de seguridad robótica y cumplimiento de instalaciones « OxMaint


