
Get in Touch with Zhouxiang
Welding Robot Safety Standards: ISO 10218, Risk Assessment, and What Every Manufacturer Needs to Know
Welding robot safety standards is a set of international and national regulations with regard to the design, system integration, and operational application of industrial robot systems designed for welding purposes. The international / national standards include ISO 10218, the ANSI/A3 R15.06, and AWS D16.1. The reason why these standards exist is that welding cells incorporating industrial robots are increasingly being used in conjunction with high-speed machinery and arc glare, bursts of UV radiation, sparks, electric shocks, and potentially deadly fumes- a confluence of factors that has already resulted in dozens of workplace fatalities and hundreds of grievous injuries across North America. This handbook summarizes the relevant safety regulations, explains how to undertake a risk analysis, outlines required safeguards to your welding robot cell, and highlights what the industry is getting wrong.
Why Welding Robot Safety Standards Exist — And Why They’re Not Optional

All of the welding robot cells we manufacture at Zhouxiang ship with a risk analysis and validation report. We do this of our own accord, and for compliance with international / nationwide standards, to safeguard our employees and clients. Hard statistics on unmitigated welding robot system accidents are startling:
A NIOSH study published in the American Journal of Industrial Medicine (2023) identified 41 fatalities from in-plant robotics from 1992-2017. Of those, 83% involved stationary robots — the type used in welding — and 78% involved the robotic tool striking a worker during regular operation. A separate 2024 analysis of OSHA Severe Injury Reports found 77 robot-related accidents between 2015 and 2022, with stationary robot incidents resulting primarily in finger amputations and fractures to the head and torso.
41
robot-related fatalities (1992–2017, NIOSH)
$165,514
max OSHA penalty per willful violation (2025)
$125,058
average workers’ comp per amputation claim
No Occupational Safety and Health Administration (OSHA) safety standard exists specifically for robotics in the workplace. Instead, the agency enforces welding safety and robot safety through existing general industry standards- Machine Guarding (29 CFR 1910.212), Lockout/Tagout (29 CFR 1910.147), and the landmark General Duty Clause, Section 5(a)(1). If OSHA believes a recognized hazard exists and you have not conducted a risk assessment surrounding it, it can pursue a willful violation carrying up to $165,514 per instance. In the Ajin USA case, a robot fatality at a Hyundai supplier resulted in 48 willful violations and over $2.5 million in combined penalties.
⚠️ Important
Lockout/tagout (1910.147) is consistently a top-10 OSHA violation. In 2022–2023, OSHA issued 2,532 LOTO citations across 1,368 inspections in manufacturing alone — totaling $20.7 million in penalties. Most robot-related fatalities occur during maintenance operations.
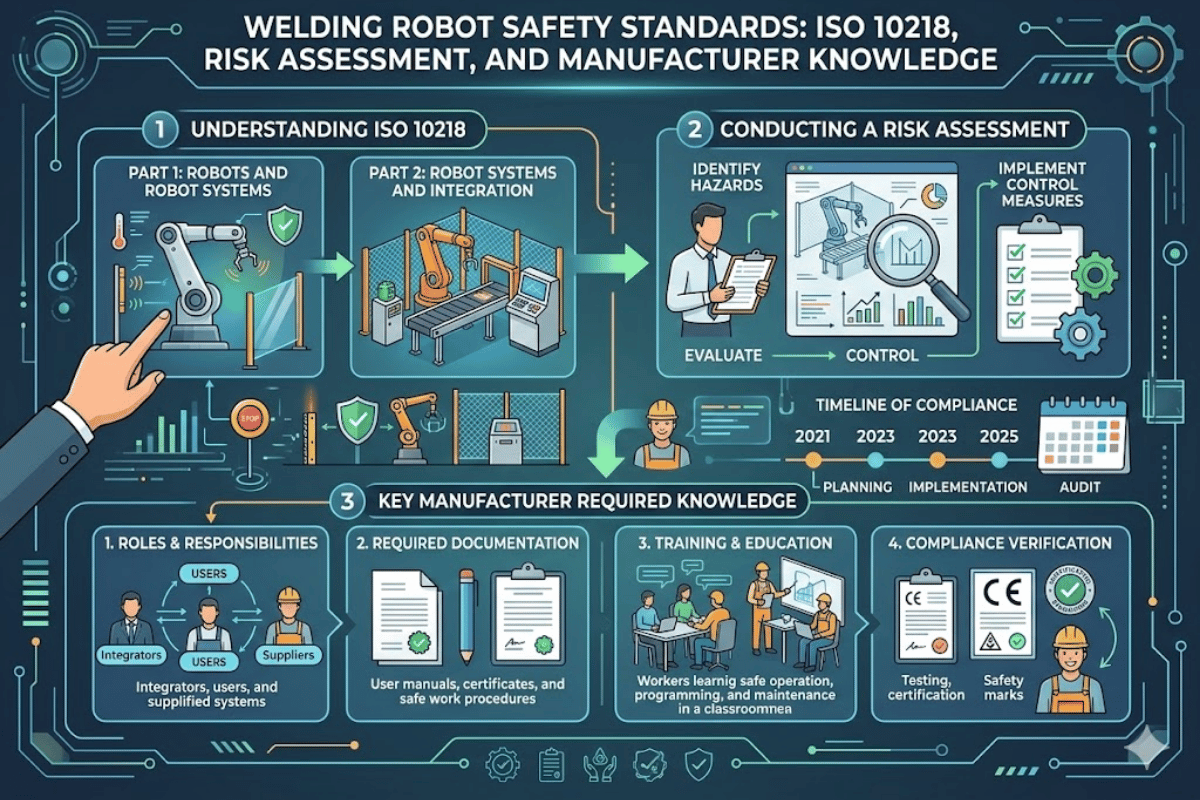
ISO 10218: The Global Safety Framework for Welding Robots

ISO 10218 is a two-part international safety standard which establishes safety requirements for industrial robots and robot systems. Part 1 defines safety requirements for the design and manufacture of the robot; Part 2 covers system integration and application. Both Parts received major revisions in February 2025- the first major industrial robot safety update in 14 years, and the most revolutionary in over a decade.
| Aspect | ISO 10218-1:2025 (Robot Design) | ISO 10218-2:2025 (System Integration) |
|---|---|---|
| Scope | Safety requirements for robot design and manufacture | Safety requirements for integrating robots into cells and applications |
| Who must comply | Robot manufacturers (FANUC, ABB, KUKA, Yaskawa, etc.) | System integrators, end-users, and OEMs building robot cells |
| Page count | 95 pages (up from 50 in 2011) | 223 pages (up from 72 in 2011) |
| Key 2025 changes | Class I/II robot classification; cybersecurity requirements; per-function Performance Levels | ISO/TS 15066 cobot content integrated; dynamic safeguarded spaces; expanded risk assessment |
| Functional safety | Replaces blanket PL d / Cat 3 with explicit per-function Performance Levels | PFL contact limits with quasi-static and transient force thresholds |
In the North American national context, ANSI/A3 R15.06-2025 — accredited by the American National Standards Institute — combines both ISO 10218 Parts. Published by the Association for Advancing Automation (A3, formerly the Robotic Industries Association), it has grown from 162 pages to 403 pages and now constitutes a third part dedicated to user responsibilities. Despite the standards being entirely voluntary, OSHA recognizes ANSI/A3 R15.06 as the applicable safety standards- a court or an investigator generally considers this standard as the essential minimum. Where specific robotic welding applications demand different or more stringent requirements, robotic systems must comply with application-specific standards that strengthen safety beyond the general framework.
For welding-specific robotics, AWS D16.1M/D16.1:2018, the specification for robotic arc welding, provides additional safety requirements for welding robot systems and ancillary equipment covering GMAW and FCAW processes, including mandatory risk assessments on arc welding robot systems, program verification (dry-run without arc), and trained personnel observation during live welding operations.
Risk Assessment for Welding Robot Cells

A risk assessment is the foundation of every compliant welding robot cell. Both ISO 10218-2 and ANSI/A3 R15.06 require that the integrator conduct a documented risk assessment before the cell enters production. Skip this step, and every other safety measure you install lacks a documented justification.
Risk assessment methodology follows ISO 12100:2010 — the foundational Type-A machinery safety standard — which defines a three-step process: determine the limits of the machinery (intended use, foreseeable misuse, all lifecycle phases), systematically identify all hazards, and estimate and evaluate the risk for each one. RIA TR R15.306-2016, a companion standard, adds a task-based approach specifically for robot cells: break down every human activity around the robot — programming, teaching, maintenance, loading, troubleshooting, cleaning — and assess hazards for each task individually.
On our production floor at Zhouxiang, we learned early that the biggest risk assessment failures come from treating the robot as a single hazard source rather than mapping every task a human performs near it. A teach pendant operator during robot operation at reduced speed faces different hazards than a maintenance technician clearing a jam with guards open. Both scenarios require distinct safety measures and documentation.
Welding Robot Cell Hazard Categories
- Mechanical hazards — crushing and pinch points between robot arm and fixtures, impact from unexpected movement, trapping hazards, flying spatter
- Electrical hazards — exposure to welding current, electromagnetic fields, stored energy in capacitors and pneumatic systems, electric shock from exposed conductors
- Thermal hazards — arc radiation burns, hot surfaces on torch and workpiece, molten metal contact
- Welding arc radiation — UV exposure causing welder’s flash (photokeratitis); approximately half of arc eye injuries occur in co-workers who are not welding
- Fume inhalation — welding fumes containing manganese, hexavalent chromium (Cr VI), zinc oxide, and other toxic compounds
- Noise — arc process noise, robot movement, and peripheral equipment
Risk Reduction Hierarchy (ISO 12100)
- Inherently safe design — Eliminate or reduce the hazard at its source (increase clearances, lower robot speed, select lower-fume welding processes)
- Safeguarding and engineering controls — Physical barriers, interlocked gates, light curtains, fume extraction systems
- Information for use — Training, warning signs, PPE — the least effective level, never a substitute for engineering controls
Compared to manual welding, robotic welding specifies requirements for safeguarded spaces, robot speed monitoring, and interlock integrity that go beyond manual operations. ISO 10218-2 provides requirements for each lifecycle phase of the cell, from initial design through decommissioning.
Safeguards for Welding Robot Cells — Physical and Electronic

Once risk assessment controls out hazards unable to be eliminated by it, the next step is implementing safeguards for the welding robot cell. An efficient welding robot cell incorporates a layered defense system- physical barriers for primary protection, electronic safeguards as a secondary system, and emergency stop systems as a final line of defense.
| Safeguard Type | Application | Standard Reference |
|---|---|---|
| Perimeter fencing (fixed guards) | Primary enclosure around robot work area; minimum 1,400 mm height | ISO 14120, ISO 13857 |
| Interlocked access gates | Entry points with electromechanical, RFID-coded, or trapped-key interlocks | ISO 14119:2024 |
| Light curtains (Type 4 ESPE) | Active optoelectronic detection at loading/unloading openings; rated up to PLe/SIL3 | IEC 61496 |
| Safety laser scanners | Zone-based detection with configurable warning and protective zones (up to 5.5 m range) | IEC 61496-3 |
| Safety mats (pressure-sensitive) | Secondary floor-level detection inside the perimeter guarded area | ISO 13856-1 |
| Emergency stop buttons | Red actuator on yellow background; must latch until manually reset; within reach at all times | ISO 13850:2015 |
Calculating the minimum safety distance for light curtains requires the formula from ISO 13855: S = (K × T) + C, where K is the approach speed (2,000 mm/s for hand/arm approach), T is the total system response time (light curtain + monitor + machine stop), and C is a supplementary distance based on the detection resolution. For most welding robot cells, this calculation yields a minimum mounting distance of 400–800 mm from the hazard zone.
⚠️ Important
An emergency stop [alone] is never adequate as the sole safety measure for a welding robot cell. ISO 13850 requires e-stops to be employed as a complement to other safeguarding systems and not a substitute. Safety measures should include primary safeguarding (fencing, light curtains, area scanners) to prevent access to the hazard zone in the first place.
Zone-based safety architecture is the current best safety practice for robotic welding cells. Physical barriers with interlocked gates form the outer zone. A warning zone monitored by laser scanners triggers audible and visual alarms when personnel approach. A protective zone triggers a safety-rated monitored stop (now called “monitored standstill” in ISO 10218:2025) if anyone breaches the boundary. Access to the inner zone — inside the cell — requires locked gates with full lockout/tagout procedures.
Collaborative Robot Safety in Welding Applications
Collaborative robots are experiencing a soaring evolution in welding, but the technical language is changing as well. ISO 10218:2025 now refers to “collaborative applications” rather than “collaborative robots”. Why? whether a robot is classified as collaborative depends on the use case, not the tool component. If the tool component of welding is force-limited, but it is the process which is not – then it is not a collaborative situation.
ISO/TS 15066 – evolving to classify and educate in the context of ISO 10218-2:2025 – states that four operating modes constitute collaborative situations:
- Safety-rated monitored stop; The robot does not move until the human enters, or until he/she passes beyond the hazard zone; runs fully when no human is present.
- Hand guiding; The robot is moved directly by the user who controls it through a hand-held device located near the end effector. (path teaching)
- Speed and separation monitoring; The robot and the user share the same workspace while sensors maintain a safe distance throughout.
- Power and force limiting (PFL); Contact is expected; payload, speed, and inertia are restricted so forces stay below biomechanical pain-onset thresholds — typically 250 mm/s or less
The University of Mainz conducted research on biomechanical limits for the entire body and concluded that no contact is permissible with the face, skull or forehead in any mode of a collaborative application. Annex A of ISO/TS 15066 lists maximum forces for 12 regions and 29 locations on the body. Quasi-static (clamping) thresholds are 40–65% of transient (impact) values because sustained compression causes tissue damage at lower forces.
💡 Decision Framework: Does Your Welding Cobot Need Fencing?
Even if the collaborative robot arm is PFL rated arc welding hazards still exist that cannot be fully addressed through limiting—for example there are no limiting solutions for UV, arc flash, hazardous fumes, molten spatter, and radiant heat. To be sure, in practice the vast majority of robot welding cobot cells still will be equipped with a three-sided perimeter fence that encloses arc glare curtains with access being via a single open loading side protected with light curtains or area scanners. Fencing is typically only a small fraction—around 20 percent—of the total cost of a welding workcell.
Operator Training, PPE, and Safety Culture

Engineering controls and safeguards comprise the first two levels of the hierarchy of risk mitigation in robotic welding systems. Training, PPE, and administrative controls—the third level of the hierarchy—address the gaps hardware cannot cover.
OSHA 29 CFR 1910.252 specifies suitable eye protection for the welder and helper. For GMAW—a common process in robotic welding—auto-darkening welding helmets should be rated to a shade 10-13 based on amperage (shade 11 from 60-160 Amps, 12 from 160-250 Amps, 14 from 250-500 Amps, according to ANSI/AWS). Even operators monitoring a robotic weld through observation windows need shade-rated protection — the arc does not distinguish between a hand welder and a bystander. Beyond welding helmets, safety glasses with side shields should be worn away from the arc for protection against flying particles and reflected UV in the welding environment.
Fume capture and exhaust are equally important. OSHA specifies mechanical ventilation whenever the inside of the workspace is less than 10,000 cubic feet per welder or the ceiling height is less than 16 feet and at least 2,000 CFM per welder. ACGIH sets the threshold limit value for general welding fumes at 5 mg/m³ (8-hour TWA), but individual constituents carry far lower limits — manganese at 0.02 mg/m³ and hexavalent chromium at 0.01 mg/m³. Proper ventilation cannot be replaced solely through PPE for welding stainless and high-manganese alloys.
Welding Robot Operator Training Checklist
- ✔
Lockout/tagout (29 CFR 1910.147)—either authorized or affected employees - ✔
Teach pendant operation at reduced speed with enable switch - ✔
Emergency stop location and activation for every station - ✔
PPE selection and inspection — helmet shade verification, respiratory protection, fire-resistant clothing - ✔
Arc welding hazard recognition — UV exposure, fume risks, spatter burns - ✔
Dry run program validation (per AWS D16.1), prior to live welding - ✔
Near-miss reporting procedures and safety culture participation
During our training at Zhouxiang we require each new welding cobot operator to pass the program validation checklist above prior to independently operating a cell. Retraining at any change in cell layout, controller software, or welding process is also required. OSHA requires the employer to document training requirements – something many facilities fail to do until right before a compliance inspection.
Creating a culture of safety goes beyond individual training — it means consistent enforcement of safety practices, health and safety reporting, and attention to safety at every level for all personnel entering the robotic welding cell.
Common Safety Compliance Mistakes and How to Avoid Them

One area of persistent nonconformity we observe during integration audits is assuming that purchasing a CE-rated robot automatically makes the cell compliant. This isn’t the case. Robot manufacturer testing covers the robot itself—ISO 10218-1. Cell-level safety considerations—hazard analysis, validation documentation, safeguarding—fall to the end-user and system integrator (ISO 10218-2).
| Mistake | Consequence | Fix |
|---|---|---|
| Incomplete risk assessment — assessing “the robot” instead of each human task | Hazards involved in maintaining the cell, clearing jams, and teaching are overlooked — these phases account for most injuries | Use task-based methodology (RIA TR R15.306); document every human interaction with the cell |
| Bypassed safeguards and maintenance mode abuse | Operators defeat interlocks to clear jams faster; maintenance mode left active during production | Install RFID-coded interlocks (ISO 14119:2024); design maintenance routines that don’t require blanket interlock override |
| Undocumented cell modifications | New gripper, software update, or work area change invalidates original safety rating and risk assessment | Log every modification in a CMMS; trigger risk re-assessment for each change |
| Verification without validation | Documents look correct on paper, but installed safeguards are never functionally tested | After installation, validate all safety functions via analytical and functional tests — confirm the robot stops before the hazard zone is reached |
| No post-installation safety audit schedule | Safety protocols degrade over time; manual checklists stored in binders create audit gaps | Digitize safety inspections; schedule periodic reassessments covering wear, breakage, and undocumented changes |
At their root, most of these mistakes come from treating safety as a one-time installation rather than an ongoing program. ANSI/A3 R15.06-2025 now includes explicit user responsibilities in Part 3, recognizing that the end-user’s role does not end at commissioning. Facilities with digitized robotic safety inspection systems are 3.2 times more likely to pass OSHA and ISO 10218 audits without findings, largely because automated tracking catches undocumented modifications that manual processes miss.
Strong safety programs follow clear safety principles: every modification to an industrial welding robot triggers re-assessment of safety parameters, potential safety gaps are documented, and the use of robotic safety inspection systems is verified against applicable requirements.
Frequently Asked Questions

Q: What is the robotic welding standard?
View Answer
ISO 10218-1 and ISO 10218-2 (revised 2025) addresses the robot hardware and system integration. ANSI/A3 R15.06-2025 serves as the U.S. national adoption. AWS D16.1M/D16.1:2018 adds specific rules for GMAW and FCAW processes.
Q: What is ISO 10218 and how does it apply to welding robots?
View Answer
ISO 10218 is a two document international standard for industrial robot safety. Part 1 (robot design and manufacture requirements) is relevant to robot manufacturers; part 2 (robot system integration, safeguarding and application level safety) applies to system integrators and end users. The standard is application neutral and applies to all, including welding.
The 2025 version incorporates collaborative application safety, the cybersecurity demands of intelligent devices and dynamic safeguarded spaces.
Q: What are the safety requirements for welding machines?
View Answer
Welding machine safety requirements are covered by several combining standards. OSHA 29 CFR 1910.252 covers basic employer requirements for PPE, ventilation, and fire safety for all welding operations. NFPA 51B specifies fire safety requirements for welding and cutting.
AWS Z49.1 legislates welding, cutting, and other hot work safety. Combined these standards require: A portable mechanical ventilation capable of providing at least 2, 000 CFM of fresh air for each welder in the confined space, approved filter lens shade rating for amperage and process, a fire watch when within 35 feet of the hot work area, various electrical safety precautions to avoid shock, and documented prep-train for each operator before assignment to hot work.
Q: What is ANSI/RIA R15.08?
View Answer
ANSI/RIA R15.08 is the American safety standard used to classify Industrial Mobile Robots(IMRs). Such robots are autonomous mobile robots implemented in industrial environments. The standard considers 3 types of IMRs, the IMRs themselves (Part 1-2020), system integration (Part 2-2023) and user responsibilities (Part 3- future).
IMR have to be classified into 3 types: A(standalone IMR), B(IMR with passive/active payloads) and C(IMR with manipulator arms- in the case where the mobile platform carry a welding cobot).
Q: Do collaborative welding robots need safety fencing?
View Answer
To a large extent, yes. Although the collaborative robot arm has the capability to comply with the power and force limiting requirement, the arc welding process inherent hazards including: ultra violet radiation, arc flash, toxic welding fumes, molten spatter and radiant heat sources cannot be controlled using PFL technology. Most robotic welding cobot cells use perimeter fencing on three sides with arc glare curtains and a single open loading side protected by light curtains or area scanners.
The specific safeguarding for each application will be governed by a risk assessment.
Q: What are the biggest safety hazards in robotic welding?
View Answer
The main 6 safety risks when working with robotic welding include: 1) arc flash and ultraviolet radiation burning eyes and skin 2) crushing and impact injuries from the robot arm while moving unexpectedly 3) electric shock from the welding equipment and/or sheathed or exposed conductors 4) welding fume inhalation containing manganese, hexavalent chromium and other carcinogens 5) pinch point injuries with moving robot parts getting caught on fixed parts 6) burns from molten metal and hot surfaces.
Need a Welding Robot Cell Built to Standard?
Zhouxiang designs and manufactures welding robot systems with documented risk assessments, validated safeguards, and full compliance documentation included. Explore our welding robot solutions or request a consultation.
References & Sources
- Robot-related fatalities at work in the United States, 1992–2017 — NIOSH / American Journal of Industrial Medicine (2023)
- Robot-related injuries in the workplace: An analysis of OSHA Severe Injury Reports — Applied Ergonomics (2024)
- OSHA Robotics Standards — U.S. Department of Labor
- OSHA Penalties — U.S. Department of Labor
- ANSI/A3 R15.06-2025 Robot Safety Standard — ANSI Blog
- AWS D16.1M/D16.1:2018 Robotic Arc Welding Safety — ANSI Blog
- ISO 12100:2010 Safety of Machinery — Risk Assessment — International Organization for Standardization
- 29 CFR 1910.252 General Requirements (Welding, Cutting, Brazing) — U.S. Department of Labor
- ISO/TS 15066 Explained — Association for Advancing Automation (A3)
- Robotic Safety Inspections and Facility Compliance — OxMaint


