
Get in Touch with Zhouxiang

Laser seam tracking welding robot technology lets a robot follow the actual weld joint in real time, correcting the torch position as it goes instead of blindly running a pre-taught path. That single capability is the difference between a robot that welds a perfect part and one that lays a bead three millimeters off the joint because the plate shifted under heat. This guide explains how the technology work, how accurate it really is, how it compares with through-arc and touch sensing, and when it’s worth the cost, with cited data and a decision framework competitors leave out.
Quick Specs: Laser Seam Tracking
| Sensing principle | Laser triangulation (structured-light profile) |
| Typical tracking accuracy | ≈ ±0.1–0.3 mm (setup dependent) |
| Tracking speed | Up to ~85 mm/s (≈200 in/min), often faster than weld travel |
| Contact | Non-contact (optical) |
| Look-ahead distance | Sensor leads the arc by ~10–40 mm |
| Best joints | Butt, fillet, lap, V-groove |
| Main limits | Reflective/aluminum surfaces, spatter on optics, needs line-of-sight |
Values are typical industry ranges and vary by sensor, controller, and joint. Confirm figures against your supplier’s data for your parts.
What Is Laser Seam Tracking? (And How It Differs from Seam Finding)

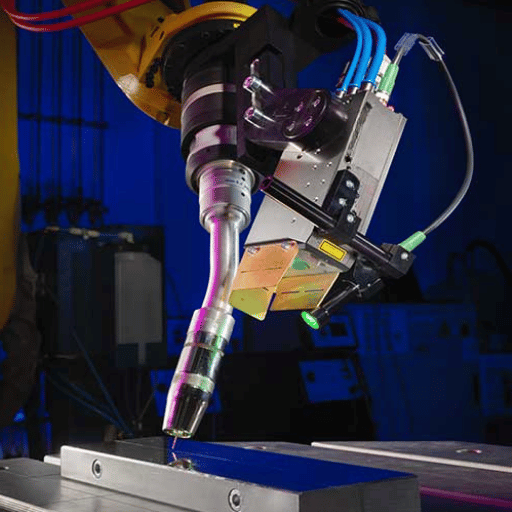
Laser seam tracking is a real-time sensing method that keeps a welding robot’s torch centered on the weld seam while the arc is running. A laser projects a line across the joint, a camera reads how that line deforms over the joint geometry, and the system continuously feed position corrections to the robot so the weld path matches the part that’s actually in front of it, not the part that was programmed last week.
People confuse it with seam finding, but the two aren’t interchangeable, and using the wrong word with an integrator will get you the wrong quote. The technique is sometimes called weld seam tracking, and it applies to a fillet weld, a butt weld, or a groove weld alike.
What is the difference between seam finding and seam tracking?
Seam finding is a one-time locating step before the arc strikes: the robot touches or scans the part to find where the joint start, then welds a corrected-but-fixed path. Seam tracking is continuous correction during the weld, adjusting the torch as the joint wanders from thermal distortion, fit-up variation, or tack pull. In short: seam finding answers “where does this joint begin?”; seam tracking answers “where is the joint right now, mid-weld?” Many production cells use both, a find to set the start, then tracking to hold the line.
Seam tracking is one of several sensing approaches in robotic welding. The common families are touch/tactile sensing, through-arc seam tracking, 2D laser vision, and 3D laser vision. The rest of this guide focuses on the laser-vision branch, because that’s where most precision automation work is heading, but the comparison below treats each method fairly.
💡 Key takeaway
Seam finding corrects the start; seam tracking corrects continuously through the weld. If your joints move under heat, finding alone will not save the bead.
How Laser Seam Tracking Works: Triangulation and the Correction Loop

A laser seam tracking system is a closed loop with four stages running many times per second. Understanding the loop is the fastest way to predict where a system will succeed and where it will struggle.
The sense → measure → offset → correct loop
- Project: a laser line (or multiple lines) is cast across the joint ahead of the arc.
- Measure: a camera mounted at a fixed angle see the line bend over the joint profile; triangulation converts that bend into a 3D measurement of the joint’s position and shape.
- Extract: software finds the joint feature, the root of a V-groove, the corner of a fillet, and computes the offset between where the torch is and where the joint actually is.
- Correct: the offset is sent to the robot controller, which nudges the torch in real time. The cycle repeats continuously down the weld.
Geometry matters here. Because the camera leads the arc by a look-ahead distance (often 10–40 mm), the system measures the joint slightly before welding it, giving the controller time to react. Set the look-ahead too short and corrections lag; set it too long and the sensor read joint that may still shift before the torch arrives. That’s why a laser vision sensor is tuned to a specific standoff window rather than mounted arbitrarily, and why the scanner’s position relative to the weld pool is part of the commissioning work.
Why laser triangulation and not simpler methods? Because it’s non-contact, fast, and high-precision, the three properties academic work consistently identifies as the keys to real-time tracking in robotic welding, according to peer-reviewed research on laser-vision seam tracking published in the National Library of Medicine. No contact means no probe to wear or crash; speed means the sensor keep up with the weld; precision means the offset is trustworthy. So what? It’s the only mainstream method that measures the joint’s full shape, not just its presence, which is what makes adaptive welding possible downstream.
Laser vs. Through-Arc vs. Touch Sensing: Choosing a Method
One assumption worth killing early: laser tracking isn’t automatically the right answer. Through-arc and touch sensing each own a niche, and a good integrator picks by joint, material, and budget, not by brochure. Here’s the honest comparison with concrete differences.
| Method | How it senses | Corrects during weld? | Best fit | Key limitation |
|---|---|---|---|---|
| Touch / tactile | Wire or torch physically probes the part to locate the joint | No — pre-weld locate only | Heavy, rigid parts; simple joints | Adds ~3–5 s per search; finds start only, cannot adapt mid-weld |
| Through-arc (TAST) | Reads welding current as the torch weaves across the joint | Yes | Thick-section fillet/groove, multipass | Needs weaving + thicker material; no gap/shape data |
| 2D laser line | Single laser stripe + camera triangulation | Yes | General butt/fillet at moderate precision | Limited profile data; spatter/reflective sensitive |
| 3D laser vision | Structured-light profile capturing joint shape + gap | Yes | Precision laser/MIG, varied joints, gap measurement | Higher cost; reflective/aluminum + spatter; needs line-of-sight |
Through-arc seam tracking deserves respect. It has no optics to foul with spatter, needs no clear line of sight, and is comparatively cheap, which is exactly why it remains common on heavy structural work. As one fabricator running a Lincoln/Fanuc cell put it, their through-arc system “can account for variability in a joint,” with a camera system as the upgrade option. Its trade-off: TAST needs a weave and enough material thickness to read meaningful current changes, and it tells you nothing about gap width or joint shape.
✔ Advantages of laser seam tracking
- Continuous real-time correction, sub-millimeter class
- Measures joint shape and gap, not just position
- Non-contact; nothing to wear or crash
- Fast enough to outrun typical weld travel speeds
- Works on thin material where TAST can’t
⚠ Limitations to plan around
- Reflective and aluminum surfaces scatter the laser
- Spatter and fume can blind the optics
- Requires line-of-sight ahead of the arc
- Higher hardware and integration cost
- Needs calibration and a controlled standoff window
Decision shortcut: which method by joint and material
- Thin sheet, varied joints, precision MIG and laser welding → 3D laser vision
- Thick multipass fillet/groove, spatter-heavy → through-arc (TAST)
- Heavy rigid parts, repeatable fit-up, just need the start point → touch sensing
- High-mix shop with good fixturing and tight repeatability → maybe none (see ROI section)
Accuracy and the Error Budget: What “Real-Time Tracking” Really Delivers

Vendors love to say “high precision.” Buyers need a number and the conditions behind it. Laser seam tracking typically holds the torch within roughly ±0.1–0.3 mm of the joint under controlled conditions, but that figure is the output of an error budget, not a fixed spec, and treating it as fixed is how shops get burned.
How accurate is laser seam tracking?
Accuracy depends on the full chain: sensor resolution, calibration quality, standoff stability, part surface, robot repeatability, and the interference environment around the arc. Research on real-time seam extraction is explicit that arc light and spatter are critical interference sources for laser vision sensors operating near a live arc, see the work on real-time seam extraction using laser vision sensing. Newer approaches narrow the error: a 2026 study combined an adaptive refinement algorithm with fixed-geometry laser triangulation to push seam-tracking sensor precision higher. So the honest answer is: sub-millimeter is realistic, but the number you actually get is the worst link in your chain.
📐 Engineering Note — The One-Third Rule
Spec your sensor’s tracking accuracy to be no worse than about one-third of the joint’s allowable weld tolerance. If a butt joint tolerates ±0.6 mm of bead placement, you want tracking held to ≈±0.2 mm so the sensor consumes only a third of the budget, leaving room for robot repeatability and thermal drift. Stack the errors: tracking error + robot repeatability + fixturing slop must still fit inside the weld tolerance. If the three together exceed it, more sensor accuracy won’t save the weld; the fixturing or the joint design has to change first.
“On long ground-rail runs we treat tracking accuracy as one term in an error budget, never the whole answer. The biggest gains usually come from stabilizing standoff and fixturing, not from chasing a tighter sensor spec sheet.”
Integrating Laser Seam Tracking with Welding Robots
A seam tracking sensor isn’t a standalone gadget; it’s a node in a system. The sensor head measures the joint, a controller turns measurements into offsets, and the robot controller apply them to the weld path. Most major ecosystems support this: FANUC, Yaskawa Motoman, ABB, Lincoln Electric, Fronius, and dedicated sensor makers such as Servo-Robot, Scansonic, and Meta Vision all offer seam tracking that ties into their robot or power-source platforms. What matters is that tracking is interface-driven, how cleanly the sensor head talks to your controller, and how the offset data maps onto your welding parameters.
Tracking also interacts with programming. If you already use offline programming for welding robots, seam tracking handles the gap between the simulated path and the real part, the program get you close, and tracking absorbs the deviation. The two are complementary, not redundant: offline programming sets intent, tracking corrects reality.
Where the sensor sits depends on the machine. A long structural seam on a ground-rail welding robot station moves the robot along the workpiece, so the sensor must hold standoff over meters of travel. A gantry welding robot workstation or a cantilever welding robot reaches differently, which changes line-of-sight and the achievable look-ahead. Integration work, calibration, controller interface, and motion tuning, is also where robotic arc welding standards such as those maintained by the American Welding Society (AWS), alongside ISO robot-welding standards, apply to safety and procedure.
Where Laser Seam Tracking Pays Off, and Where It Doesn’t

Seam tracking earns its keep when the joint move and you can’t economically stop it from moving. That points to a clear set of applications: large structural welding assemblies, shipbuilding, pressure vessels, and any long weld where thermal distortion pulls the joint off the taught path. A bigger, hotter part means the joint wanders more, which means better payback and better positioning accuracy from tracking. For these jobs, steel structure welding automation with weld seam tracking turns scrap-prone welds into repeatable ones, with the adaptive control needed to hold quality across a long groove weld.
Consider a 12-meter box beam tacked at room temperature. As the first long fillet lays down, the unbalanced heat bows the beam several millimeters along its length, the joint at the far end is no longer where the program left it. Without tracking, the torch drifts off the corner and the bead misses the root. With laser tracking, the sensor read the moving joint and the torch follows the bow, holding the weld in the corner from end to end. That’s the scenario that sell seam tracking.
Now the part competitors rarely admit: sometimes the right answer isn’t to buy seam tracking at all. In high-mix, low-volume shops, cost isn’t just hardware, it’s programming time and skilled staff. A welding integrator publicly argues that adding seam tracking can defeat the purpose of simple automation, and that good fixture design with repeatable jigs often beats the added complexity. They’ve a point. If your fit-up is repeatable and your parts are small, the cycle-time and engineering overhead of sensing, recall that pre-weld searches alone can add a few seconds each, may cost more than it returns.
Is laser seam tracking worth it? A scenario check
| Your situation | Recommendation |
| Large parts, long welds, visible thermal distortion | Track — strong payback |
| Variable fit-up you can’t fix upstream | Track — protects weld quality |
| High-volume, repeatable, well-fixtured parts | Often skip — invest in fixturing first |
| High-mix, low-volume, small simple parts | Usually skip — programming overhead outweighs gain |
Before committing, run the numbers on your own part mix. A quick welding robot ROI calculator will tell you whether tracking pays for itself faster than better fixturing would.
Why Seam Tracking Fails: Common Pitfalls

When laser seam tracking disappoints, it’s rarely the algorithm, it’s the physics of the shop floor. Knowing the failure modes let you design them out before they cost you a shift.
- ⚠Reflective and aluminum surfaces scatter the laser line, so the camera loses the joint feature. Matte parts track cleanly; shiny ones need angle tuning, polarization, or a different wavelength.
- ⚠Spatter and fume coat the optics and flood the camera with arc light, the dominant interference identified in laser-vision research. Air knives, shielding, and look-ahead distance all help.
- ⚠Tack welds and prior beads can confuse feature extraction, making the system read a false joint. Good software rejects them; cheap systems don’t.
- ⚠Lost line-of-sight on tight geometry leaves the sensor blind; the torch can reach where the laser can’t see.
Does laser seam tracking work on aluminum and reflective surfaces?
It can, but it’s the hardest case. Polished aluminum and stainless reflect the laser specularly instead of scattering it back to the camera, so the joint signal drop out. Integrators handle this with sensor angle adjustments, narrow-band filtering, and sometimes multi-line sensors that give the algorithm more features to lock onto. Plan for extra commissioning time on reflective material, and validate on your actual parts, not a clean coupon.
⚠️ The biggest misconception: tracking is not a fit-up fixer
Seam tracking follows the joint — it does not add filler volume. If your gap exceeds the gap-bridging limit of your process, tracking will faithfully steer the torch over a gap it cannot fill, and you get lack of fusion or burn-through anyway. Tracking corrects position; it does not rescue bad fit-up. Beyond the gap-bridging window you need adaptive parameter control or better preparation, not just a better sensor. Catching these errors early is also why weld inspection stays essential even on tracked welds, and why understanding common weld defects helps you read what tracking can and cannot prevent.
Industry Outlook: AI-Adaptive and Fixtureless Welding (2025–2026)

Seam tracking is being pulled into a larger shift toward adaptive, AI-driven welding. Start with the market backdrop, which is growth: the broader robotic welding market was valued around USD 6.54 billion in 2025 and is projected to reach roughly USD 12 billion by 2030 at about a 9% compound annual rate, per Maximize Market Research. Within that, demand for sensing is concentrated in heavy verticals, the laser seam trackers for shipbuilding automation market was valued at USD 214.6 million in 2025 and is forecast to expand sharply over the decade.
Two technology changes matter for buyers right now. First, 2D line tracking is giving way to full 3D gap and volume measurement: patent activity in 2025, including filings tied to Path Robotics, points to structured-light triangulation that measures the gap along the seam length, not just its centerline. That data feeds adaptive parameter control, the system changes voltage, speed, or weave based on the gap it see. Second, fixtureless welding is emerging, where advanced tracking and sensing reduce reliance on heavy fixtures, an idea that only work if tracking is trustworthy enough to stand in for clamping.
If you’re specifying a system in 2026, ask one concrete question: does it do 2D line tracking only, or full 3D vision gap measurement feeding adaptive control? Your answer determines whether you’re buying yesterday’s path-follower or a platform that can grow into adaptive, partly fixtureless production. Global robot-adoption context from the International Federation of Robotics suggests this automation pull isn’t slowing.
Frequently Asked Questions
Q: Is laser seam tracking worth it for low-volume or one-off welding?
View Answer
Often not. For small one-off parts with repeatable fit-up, fixturing usually beats the programming overhead.
Q: Can laser seam tracking work with stainless steel and thin sheet?
View Answer
Yes, and thin sheet is actually a strong case for laser vision because through-arc tracking struggles below certain thicknesses. Polished stainless can reflect the laser and needs angle or filter tuning, but matte and brushed finishes track well.
Q: How fast can a robot weld while laser seam tracking is active?
View Answer
Rarely is the sensor the bottleneck here. Laser vision systems can track at speeds reported up to roughly 85 mm/s (≈200 in/min), frequently faster than the welding process itself. In practice, travel speed is limited by metallurgy — heat input, weld pool control, and the deposition rate your welding parameters allow — not by how fast the scanner can read the joint. If you are pushing speed, the weld will break down before the tracker does, so tune the process first and let tracking keep pace.
Q: Do I still need offline programming if I have seam tracking?
View Answer
They solve different problems. Offline programming defines the intended path efficiently; seam tracking corrects the difference between that path and the real part. On varied or large assemblies, using both gives you fast setup plus real-time accuracy.
Q: What maintenance does a laser seam tracking sensor need?
View Answer
Mainly clean optics and periodic calibration. A fouled lens is the top cause of degraded tracking.
Q: Can seam tracking and through-arc tracking be used together?
View Answer
Yes, and some cells do exactly that. Laser tracking handles joint position and overall path, while through-arc feedback fine-tunes the torch within the joint during multipass welds. You get the joint-shape data of laser vision plus the spatter-immune feedback of arc sensing — useful on thick groove welds where the laser may lose the joint deep in a multipass sequence and arc feedback fills the gap.
Planning a tracked robotic welding line?
Whether you weld long structural seams or high-distortion assemblies, the right combination of sensing, fixturing, and motion platform decides your weld quality and payback. Zhouxiang builds and integrates these systems end to end.
Our Perspective as a Welding-Robot Integrator
Zhouxiang designs and builds robotic welding systems, including ground-rail and gantry stations where laser seam tracking runs over long structural seams. This guide reflects how we weigh tracking against fixturing and joint design on real projects, which is why it spends as much time on when not to track as on the technology itself.
References & Sources
- A Novel Seam Tracking Technique with Laser Vision SensingNational Library of Medicine (NIH)
- Real-Time Seam Extraction Using Laser Vision SensingNational Library of Medicine (NIH)
- Enhanced Precision in Seam Tracking Sensors via Adaptive Refinement and Laser Triangulation (2026)The International Journal of Advanced Manufacturing Technology (Springer)
- Welding Standards (robotic arc welding)American Welding Society
- World Robotics & Robot Adoption DataInternational Federation of Robotics
- Robotic Welding Market, Global Industry ForecastMaximize Market Research
- Laser Seam Trackers for Shipbuilding Automation MarketFact.MR


